
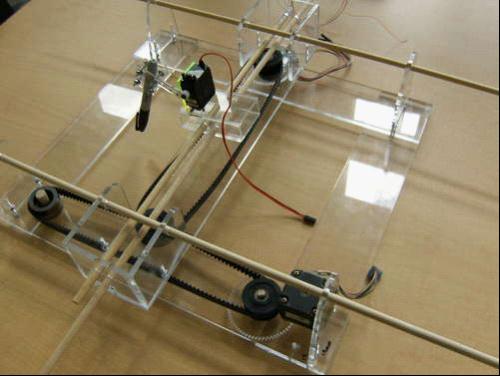
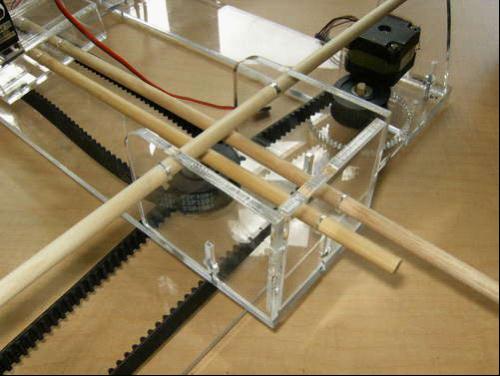
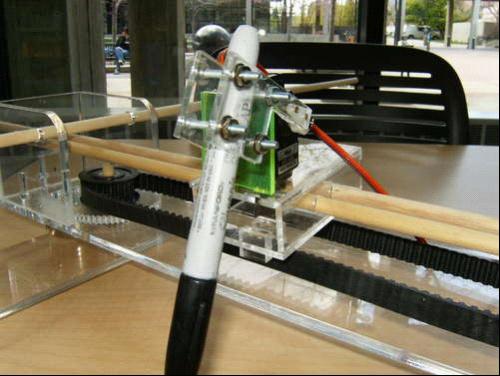
这个平面绘图仪有两个可控制的坐标轴,也可以调整画笔的高低。绘图仪底部有一个小孔,可以把笔从中穿过去。这样就可以保证在纸面、地面、墙面、各种表面上作画。两个坐标轴都以步进电机和传送带作为动力装置,通过伺服电机控制画笔高度。所有电子设备都由Arduino控制,由12伏电源适配器供电。
该项目由科罗拉多大学博尔德分校的Tommaso Buvoli, Kristina Callaghan, Bruce Deakyne, and Phillip Dunlap在2011年春天完成。
双向电梯
2 装配底座

- 准备好至少18英寸*7英寸,1/4英寸厚的压克力板(底座大小)。 附件struct.svg 里有4个部件的图纸,它们组成了相应的底座和支架,可以下载参考。
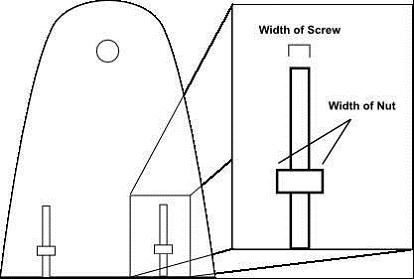
- 底座在四个角各用两个螺丝和螺母固定。根据使用的螺栓型号自行调整支柱(竖着的那个半椭圆形的东东)上小孔的尺寸和支柱缝隙的宽度。完事后就在激光切割机上切割好基本部件。
- 开始组装!
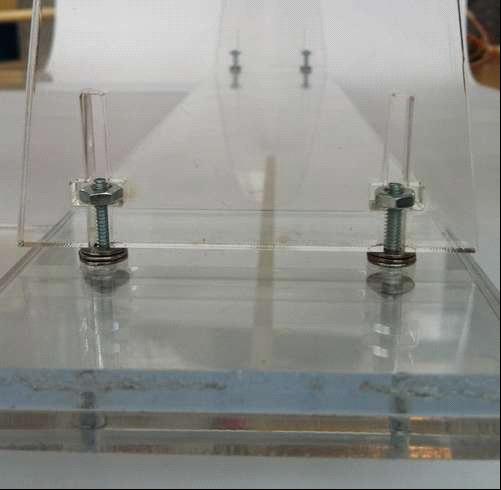
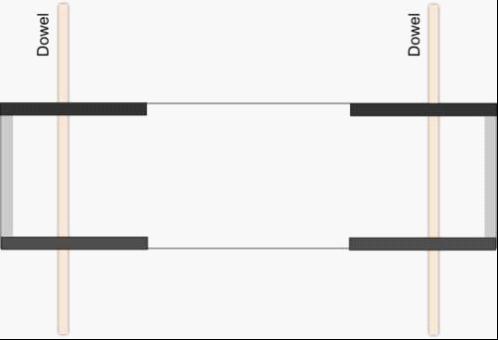
- 底座就像是中心被切掉的正方形,样子有点像规规矩矩的相框。如图所示,把四边的压克力板用螺栓连接起来。螺栓应该很容易插入小孔,再用螺母固定住。
- 在底座的每个支柱上插入两个木制销钉。
3 组装X轴移动盒
- 底座这么组装就OK了。那现在就要搭建可以沿X轴移动动的“移动盒”(可以下载 附件x-housing.svg )。
- 给制作移动盒准备一个底,六块儿面。
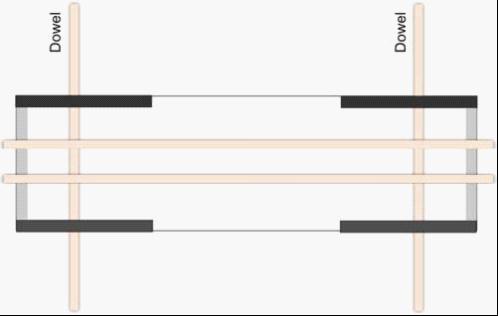
- 同样,根据螺丝大小调整一下小孔尺寸。按图上的简略结构,把6个面组装在底座上,把木销穿过小孔固定住。
4 组装Y轴移动盒


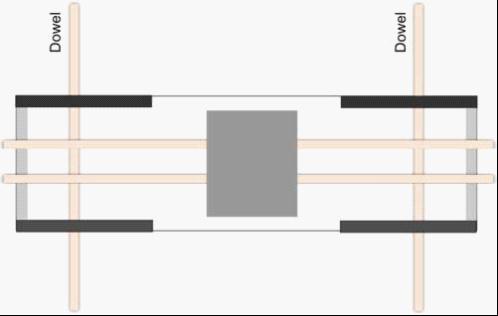
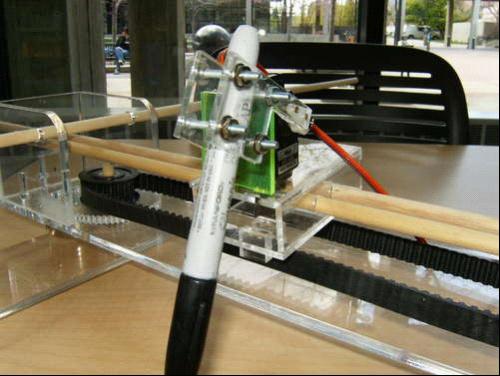
- 沿Y轴移动的“移动盒”是我们要制作的最后一个移动装置。它装有伺服电机,可以调整画笔的高低。这个“移动盒”安装在两个木销上(就是上面第三幅图中灰色的部分),伺服电机安装在“移动盒”顶上,通过“移动盒”上面的小孔固定住。
5 固定记号笔

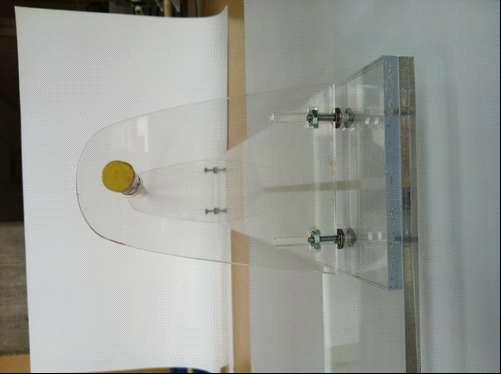
- 接下来做一个简单的小配件。它用来固定记号笔,控制画笔的升降。(下载 pen-holder.svg ,查看里面两个部件的图纸。)
- 根据需要,调整正方形夹子的大小。要是你习惯用大号记号笔画画,那就调大夹子的间距。把这两个部件简单拼接在一起,最后成型就是图中所示。把固定标记笔的四个螺丝拧紧,笔就不会滑落了。
6 齿轮组和传动带
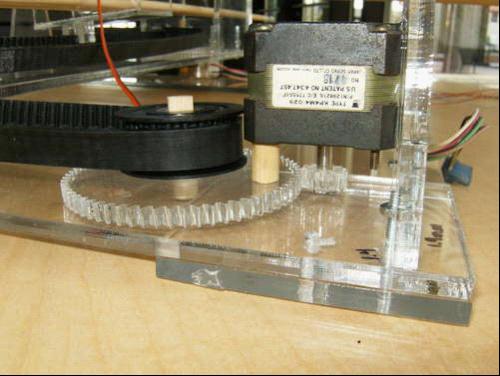
- 现在我们需要钻两个带齿轮轴的孔,建议手动钻孔,比较容易控制间距。我们需要的间距大概是11.75英寸,但是同样还是要根据你的齿轮带的长度调整。最重要的是保证齿轮带够紧,防止松弛;但又不能太紧,会产生较大摩擦。
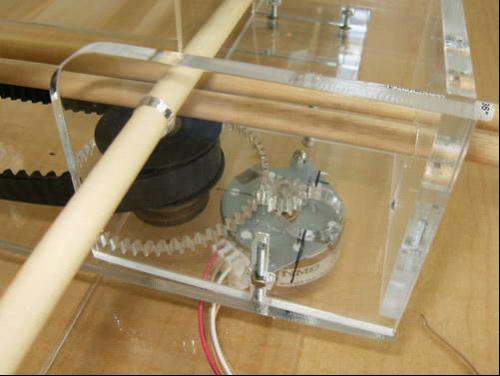
- 安装X轴电机:最好让支柱的位置接近齿轮后方。把小齿轮用胶水或者树脂胶站在电机轴上后,对准传带齿轮和电机齿轮。如图所示,步进电机装好后应该是翻过来的。调整高度使两个齿轮平齐。用树脂或胶水把支柱的一边固定在电机上,最好是能让电线对着Y轴方向的一边。

- 连好电机后,调整支柱的位置使齿轮对齐。把齿轮固定住,移动齿轮带;如果你的齿轮不在正中间,那就要调整一下电机的位置。只要找到最佳位置,齿轮就可以均匀咬合了。把两个新加螺丝的小孔位置标记出来。钻孔,并安装支柱。我们发现,在X轴底部增加2个压克力”引导块”,可以让X轴移动的更平滑。
- 在Y轴上重复同样的制作过程。注意为Y轴电机在另一边加上适当的配重。
7 电路
- 这个电路算是相当简单了。
- 把两个ULN2003A驱动芯片安装在面包板上。Arduino上的PWM管脚提供数字输出。具体的引脚在下一步中的软件中可以自定义。
- 驱动每个步进电机需要四个Arduino的管脚(称作数模引脚pins A-D,由软件中选择的PWM输出管脚决定)。每个电机的每个线圈需要两个引脚。
- 连接Arduino的数模管脚和ULN2003的1-4管脚。
- 将8管脚接地,9管脚接2.5V大电流电源。
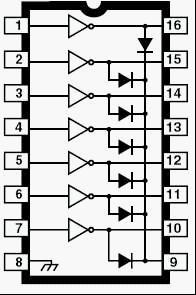
按下面的顺序连接彩色步进电机线和驱动芯片:
- 16管脚:橙色
- 15管脚:黑色
- 14管脚:红色
- 13管脚:黄色
- 9管脚:白色
另附 步进电机数据表和ULN2003输出管脚 。
- 电机连接在由Arduino驱动的EasyDriver电机驱动器上。用于来回移动记号笔的代码如下:
int stepPin = 2;
int dirPin = 3;
int LEDpin = 13;
int ii = 0;
void setup(){
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(13,OUTPUT);
digitalWrite(stepPin, HIGH);
digitalWrite(dirPin, HIGH);
}
void loop() {
digitalWrite(dirPin, HIGH);
for(ii = 0; ii
8 进一步的软件设计
我们的计划是用RepRap固件来驱动电机。RepRap是一个开放源代码项目,作为一个三轴G代码解释器,最初用于3D打印机。尽管G代码需要针对特定设备做修改,但因为它的简洁和占用空间小,在我们的平面绘图仪中已经够用了。我们打算用ReplicatorG(一个开放源代码项目,同样用于3D打印机)生成我们的G代码。它可以读取标准的svg文件,然后通过连接的装置(比如我们的平面绘图仪)将图形描绘出来。
相关材料在reprap.org 和replicat.org中可以了解到。
9 拓展工作
这个项目展示了设计和制作平面绘图仪的基础工作。在此之上还可以做些改进:
- 尽量精简平台,齿轮带,电机,画笔架等等,做出更简洁更cool的平面绘图仪。
- 使用更高扭矩的电机。
- 写一个可以在瓷砖上打印svg文件中图案的程序。
按现状来说,这个项目的意义在于:如果想用比较容易找到的材料绘制各式各样的图形,可以用平面绘图仪来实现……
10 DIYer签到处
| 编辑: | Greeny |
|---|
果壳DIY站QQ群: 132647923 (加入时请报上你在果壳的个人主页地址,以防广告ID)
果壳DIY站微博: http://t.sina.com.cn/guokrdiy