
“觅食的蚂蚁”视频演示:
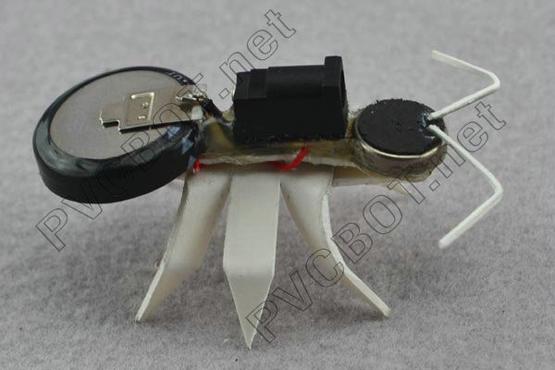
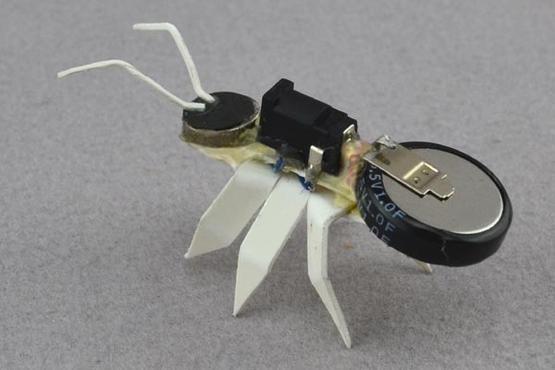
“觅食的蚂蚁”成品展示:


一、基本原理
当前机器蚂蚁使用USB接口的电源给超级电容充电,然后超级电容放电驱动振动电机转动,而振动电机再带动机器人的肢体一起剧烈震动,并由此产生运动。
1、驱动原理
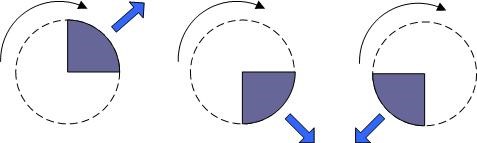
振动机器人的动力可以是说就是振动波,即通过振动电机带动整个机器人肢体产生强烈的振动,当机器人的重量较轻并且支撑不是很平稳的时候,机器人就会发生位置的移动。而通过调整机器人对于地面的支撑方式,就可以使得机器人因为振动而产生的移动是遵循一定的运动规律的,比如可以让机器人在振动的过程中整体进行曲线运动或者圆周运动。
振动电机原理
振动电机的轴上安装有一个偏心锤,也被称为振动偏心轮、振动摆锤或者振子,这是一种安装在转动的轴上但重心不是位于轴心而是远离轴心的金属锤状结构。当偏心锤高速转动时,由于锤体存在一定的质量就会不断交替循环的在轴心周围产生一个离心的外力,使得整个结构产生忽上忽下、忽左忽右的摆动,速度越快摆动越明显,从而也就产生了强烈的振动。:在普通直流电机上安装偏心锤,就变成了振动电机,振动电机最常见的应用就是手机的震机功能。
在当前项目中,由于外形结构的需要,选用的是微型扁平振动电机。
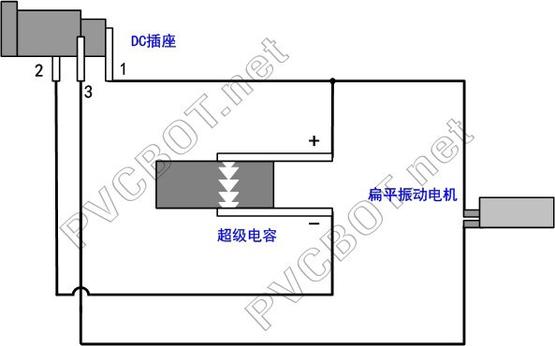
2、电路原理
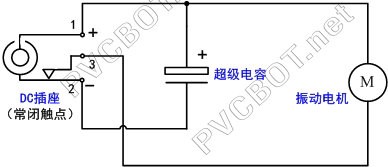
本项目的电路原理主要就是:先使用USB接口的电源对超级电容进行充电,让超级电容把电能存储下来,然后超级电容再对振动电机进行放电,驱动振动电机转动产生振动,最后由振动带动机器蚂蚁运动起来。
整个机器蚂蚁的电路分为两部分,一部分是USB充电转接线,另一部分是主体电路。USB充电转接线的电路非常简单,仅仅就是一根双排导线(红黑并线)两侧分别连接不同的接口插头而已。
充电转接线的实物连接图

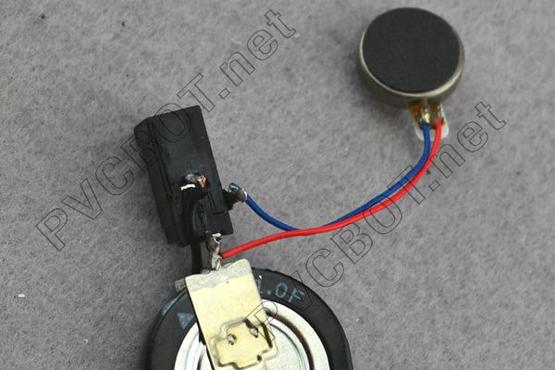
主体部分的电路原理图以及实物连接图
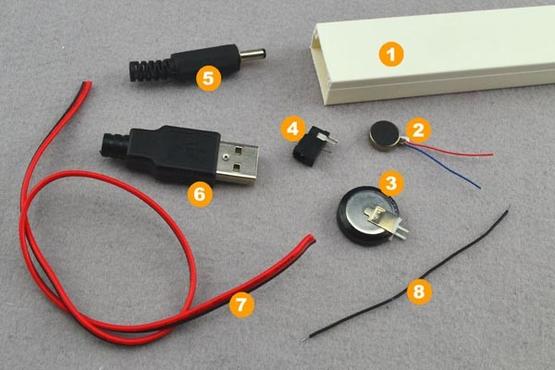
二、器材准备
|
序号 |
名称 |
规格 |
数量 |
备注 |
|
1 |
PVC线槽 |
横截面25*15mm,长10cm |
1段 |
肢体结构 |
|
2 |
振动电机 |
扁平振动电机 |
1个 |
动力 |
|
3 |
超级电容 |
扁平圆形1法拉、5.5V |
1个 |
电源 |
|
4 |
DC电源插座 |
3.5-1.1mm |
1个 |
充电插座 |
|
5 |
DC电源插头 |
3.5-1.1mm |
1个 |
转接插头 |
|
6 |
USB插头 |
USB-A插头(公) |
1个 |
转接插头 |
|
7 |
导线 |
红黑并线,长30cm |
1根 |
电源导线 |
|
8 |
导线 |
电路导线(黑) |
1根 |
电路连接 |
原材料图示
三、制作过程
1、DC插头
1-1:红黑并线穿过外壳盖。红线接电源正极,黑线接电源负极,也就是红线焊接到DC插头的短引脚,黑线焊接到DC插头的长引脚。
制作图

1-2:等DC插头的引脚焊点都冷却后,把红黑两根导线并在一起,并扣入长引脚后端突出的金属夹口内,然后用尖嘴钳把夹口夹扁,就把两根导线固定在长引脚后端上了。最后把DC插头的外壳盖拧上,就完成了DC插头的连接。
提示
提示:这样固定导线,就使得拉扯导线时,受力点不在导线的金属焊接部分,而是在导线的塑料外皮上,避免导线直接被扯断。


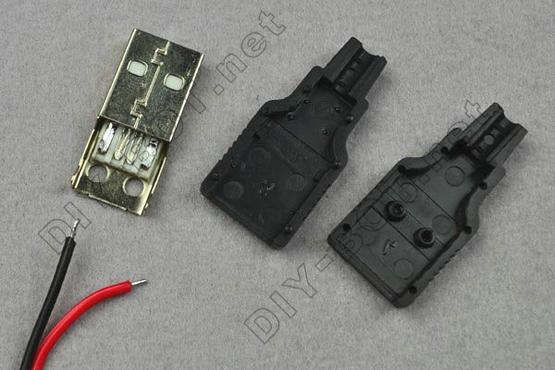
2、USB插头
2-1:红黑并线的另一端,要连接到USB插头上。把红黑并线的前端分成两股导线,拨掉塑料绝缘胶皮,并上好焊锡。把USB插头的外壳盖拆开,把USB插头分成三个部分:金属插头、外壳盖子顶部、外壳盖子底部。对于金属插头的四个电极,给其中两侧的两个电极也上好焊锡。如图所示,把金属插头部分放置于桌面上(引脚电极一面朝上),把黑色导线焊接到最左侧的电极上,把红色导线焊接到最右侧的电极上。
制作图

2-2:把金属插头装入外壳盖子底部,金属插头后端上的两个小孔正好可以扣入外壳盖子底部上的两个塑料突起。然后再把外壳盖子顶部也盖上,让盖子上下两个部分完整的扣在一起,这样就完成了“USB转DC”的充电转接线。
制作图


3、电路
在焊接电路之前,建议先看看前面的电路原理图、实物连接图,或是下面的焊接示意图,先对整体电路有个概念,然后再按照后续的步骤指引一步步完全电路的焊接。
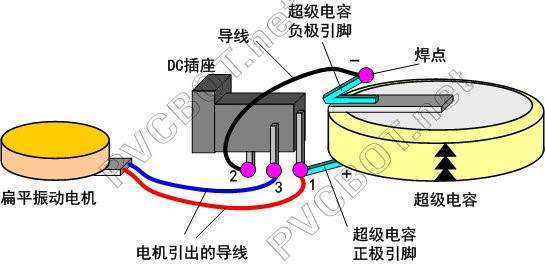
3-1:用尖嘴钳把超级电容的负极引脚往内侧弯折,并折回到靠近外壳,然后再把正极引脚往外侧弯折。把超级电容的正极引脚与DC插座后端的引脚(引脚1)焊接在一起。
提示
提示:箭头方向代表电流方向,即从电流是从正极流向负极的。对于扁平圆形的超级电容,一般在塑料外壳侧边上标有一排箭头,其中箭头出发的一侧是正极引脚(左图中下方),而箭头指向的一侧是负极引脚(左图中上方)。超级电容的负极引脚(右图中上方往后弯折的引脚)千万不能碰到DC插座的引脚。焊接的同时要求超级电容与DC插座对齐在一起。 

3-2:剪一段长2cm的导线,把导线两端的绝缘塑料外皮去掉,并且上好锡。把导线的一端焊接在DC插座的前端引脚上(引脚2)。
制作图


3-3:把导线的另一端焊接到超级电容的负极引脚上,然后把扁平振动电机的两根导线焊接到DC插座上,其中:振动电机的蓝色导线焊接到DC插座的中间引脚上(引脚3);振动电机的红色导线焊接到DC插座的后端引脚上(引脚1)。
提示
提示:由于此前DC插座的后端引脚已经和超级电容的引脚已经焊接在一起,因而焊接当前红色导线时动作要快,最好只是局部焊接而不要把原来的焊点整个熔化掉,否则DC插座与超级电容之间已经对齐的位置会发生改变。

3-4:完成了整个电路的焊接之后,不要急着做其他结构,而是要先测试电路:


1)把转接线的USB插头插到电脑USB口或者电源适配器的USB口;
2)把转接线的DC插头插到机器蚂蚁的DC插座上,则开始充电。
由于是第一次测试,建议优先选择USB接口的电源适配器进行测试。
充电大约十多秒钟后,把充电转接线的DC插头拔下,则振动电机应该强烈的振动起来。如果振动电机不会振动,则:
1)请检查电路连接是否正确,或者是否存在虚焊或接触不良的地方。
2)假如电路连接没有问题,则有可能是超级电容或者振动电机损坏了。
如果振动电机能够振动起来,说明机器人的电路是正常的,则可以继续后面的制作。
4、躯体
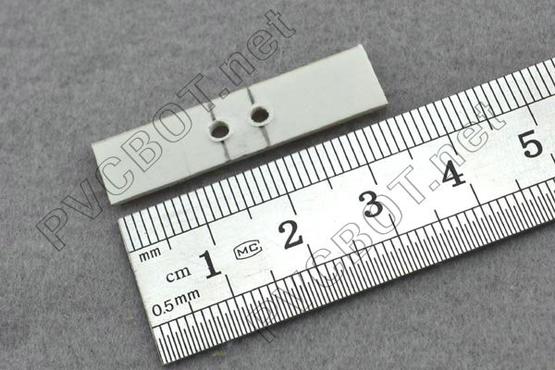
4-1:剪裁一块长3.5cm、宽0.8cm左右的PVC长条。距离PVC长条一端边缘分别1.5cm、2cm的位置画一根横截线。然后在两根横截线的中点位置上各钻一个直径2mm的小孔。把PVC长条的中间部分剪细一点(大约宽0.5cm),作为机器人的躯体。
制作图

4-2:扁平振动电机底面一般会贴有一张用双面胶粘住的不是太牢固的绝缘纸,这里要把它撕下来,以便后续用胶水固定振动电机时,可以让胶水更直接接触振动电机本身,这样才会更牢固一些。把DC插座底面的两根引脚(脚1和脚2)连同它们上面的焊点一起,插入躯体上面的两个小孔中,同时DC插座的另一个引脚(脚3)正好搭在躯体的侧面。
提示
提示:假如引脚上的焊点太大无法插入小孔,则建议重新调整焊点的大小,或者是再扩大躯体上的小孔。同时把振动电机的红蓝两根导线分别整理到躯体两侧。此时把扁平振动电机挨着DC插座,用热熔胶同时涂在振动电机底面和前端躯体之间,把它们粘贴在一起。 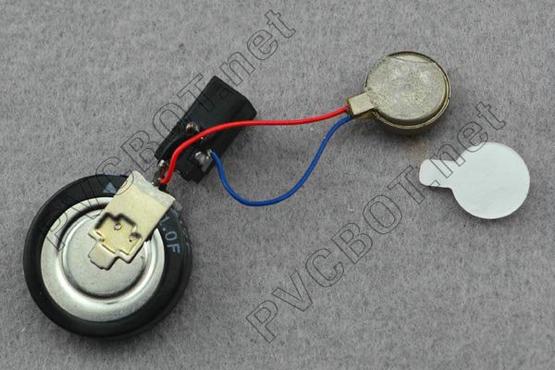

4-3:扁平振动电机应该靠着DC插座,位于躯体前端的中心位置上。把DC插头插到DC插座上,然后让DC插座对齐躯体,在DC插座与躯体之间的两侧缝隙上,滴入热熔胶,让DC插座固定在躯体上。
提示
提示:之所以固定DC插座的时候,要同时插着DC插头,主要是确保DC插座最终的位置应该高出扁平振动电机一定的高度,使得DC插头插到DC插座上时不会被振动电机给挡住。 

4-4:躯体后端与超级电容之间也涂上热熔胶,把它们固定在一起。在超级电容与DC插座后端之间的缝隙上,也滴入热熔胶。于是把各个电子器件之间都用躯体结构固定在一起,这样就完成了躯体部分的制作。
制作图




5、腿部
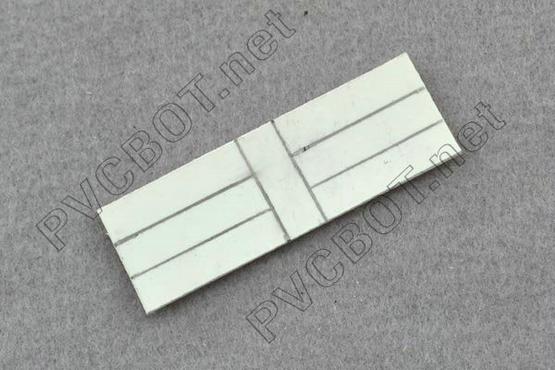
5-1:剪裁一块长4.5cm、宽1.5cm左右的PVC方块。在距离PVC方块一侧边缘2cm和2.5cm的位置,各画一根横截线,然后把两根横截线三等分,再把各自的两个等分点向两侧延伸直线。在两侧距离边缘各1cm的位置,再分别画一根横截线,在中间两条横截线与PVC方块的上下侧边之间画四根斜线,具体位置见制作图红色标记线。
制作图
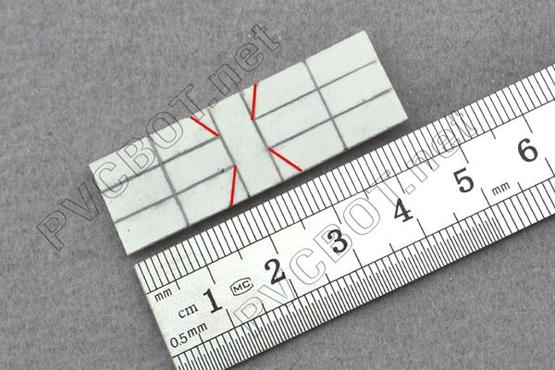
5-2:如图所示:1)对于PVC方块左右两端的各三段等分线段,在每根线段中间再画一个中点;2)PVC方块两侧的两根横截线,与三根纵向的等分线之间各有4个交点;3)把这些中点,分别与它最近的两个交点用直线相连。这样就在PVC方块两侧各得到一排等腰三角形(图中红线标记)。

5-3:从PVC方块两侧,沿着纵向的三根等分线剪进去,一直剪到中间的两根横截线位置,得到一个六条腿形状的结构。用尖嘴钳沿着标记线把六条腿结构弯折成立体状。其中四周的四条腿,要沿着此前画的斜角线分别往外侧弯折;而中间的左右两条腿,沿着中间的横截线向内侧弯折。
制作图

5-4:沿着此前画的等腰三角形标记线,把六条腿前端剪尖。每条腿上的等腰三角形标记线,还剩下横向的一根,把每条腿都沿着各自这根线再往内侧弯折一点角度,就相当于每条腿上多了一个关节,同时也使得每条腿前端的脚尖尽量垂直地面。
制作图



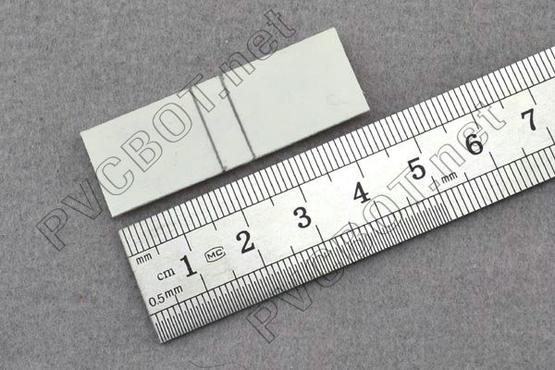
5-5:剪裁一根长3.5cm、宽0.5cm的PVC长条。在PVC长条上距离一侧边缘1cm和2.5cm的位置,各画一根横截线。这样就得到一个六足底座。把PVC长条用热熔胶固定在六足底座内侧,要求六足底座正好位于PVC长条上两根横截线之间的位置。把振动电机的红蓝两根导线从躯体两侧别起来挨着躯体。然后准备把六足底座固定到躯体上。
制作图




5-6:六足底座上的PVC长条前端的内侧,与躯体底面前端(振动电机一侧)之间,涂上热熔胶固定在一起。六足底座上的PVC长条后端的内侧,与躯体底面后端(超级电容一侧)之间,也涂上热熔胶固定在一起。于是就把六足底座安装到了躯体上,这样就完成了主要的结构制作。
制作图




6、触角
这里要给机器蚂蚁加上一对触角。用剪刀沿着PVC线槽边缘剪宽1mm左右的细条。剪两段长2cm的细条,然后从中间对半弯折成差不多直角,得到两根触角。(提示:剪PVC细条时,一般得到的细条会自然卷起来,这里需要先捋直后才使用。)
在触角前端蘸一点熔化了的热熔胶,然后迅速粘贴到扁平振动电机前端固定起来,也就是头部的上方,并排成如图所示的形状。这里仅用热熔胶固定触角可能不够牢固,可以再用PVC细条蘸一点502胶水,然后涂在触角上的热熔胶周围进行加固。注意:这里502胶水一定要借助小细条蘸一点涂着用,千万不要直接拿着502胶水的瓶口直接滴上去,否则过量的502胶水会很容易渗入振动电机内部把电机直接报废了。
蚂蚁的触角可以灵活的转到不同角度,因而这里的触角除了排成上一步那样的形状之外,也可以排着当前这样的形状,制作时可以根据自己的喜好进行选择,只是注意触角不要影响插入DC插头即可。装上触角之后,这只蚂蚁就逼真多了。



四、调试完善
接下来进行的是完整机器人的电路调试,需要先用蓄能充电转接线给机器蚂蚁充电。给机器蚂蚁充电大约十多秒钟后,就可以拔掉DC插头,则振动电机就会强烈振动起来,这个时候把机器人放置于平整的硬质表面上,它就会振动着运动起来。完成对电路方面的调试后,还需要对结构方面进行调试,以便完善振动机器人的运动规律,尤其是模仿蚂蚁觅食当中那种左右摇摆、走走停停的状态。要达到这种效果,需要不断的尝试,耐心的调整,主要包括:
- 改变两条前腿向前倾斜的程度,可以尝试两条前腿适当并拢,或者稍微离地;
- 改变两条后腿向后倾斜的程度,并且适当往两边伸展;
- 中间两条腿向两侧弯折的角度要适中,与前后腿一起配合保持整体的身体平衡。

常见问题
假如充电后电机不会振动,则要对电路重新进行检查。由于此前电路制作步骤已经对电路进行过一轮测试,当时电路部分应该是制作成功了的,而这个时候如果发现电路不能正常工作的话,那么很可能是在后续制作的过程中,又把电路的一些连接给破坏了,最常见的就是:
- 某根导线断开了,比如DC插座与超级电容间的黑色导线,或者是扁平振动电机的红蓝两根导线;
- 超级电容负极引脚(身体上方一侧)与 DC插座后端的引脚之间离得不是很远,容易碰到一起发生短路。
编辑:Jerrusalem
果壳网相关小组
果壳DIY站微博: http://t.sina.com.cn/guokrdiy