
近期,有网友对“脉冲星导航及其最终精度10米”发表其个人看法和相关评论。本人应果壳网科学人专栏编辑的邀请,就导航及脉冲星导航的基本概念、脉冲星导航的可行性和最终导航精度指标等问题进行简要讲解。其目的是避免个别的偏见和观点对广大网友的误导。
什么是导航?什么是脉冲星导航?
从广义上讲,导航是指按照预先的计划和规定将运动体从起始位置及时、安全、高效地引导到达目的地的过程。所谓运动体,是指车辆、舰船、飞机和航天器等可移动的人造物体,以及从人类本身扩展到其它生物体的活动行为。完整的导航过程包括路径规划、当前位置、航迹偏差和偏差修正4个方面的内容。从狭义上讲,将测定运动体位置、速度、时间和姿态等参数的方法和技术统称为导航。
脉冲星导航是以脉冲星辐射的X射线信号作为天然信标,在太阳系质心坐标系下,通过测量脉冲到达时间和脉冲星方向矢量,航天器自主测定位置、速度、时间和姿态等参数的过程。由于脉冲星辐射的X射线只能在大气层外空间才能探测到,因此脉冲星导航实质上是针对大气层外空间飞行的航天器的自主导航。同一个X射线脉冲信号到达航天器的时间可以用原子钟记录下来,而到达太阳系质心的时间是能够精确预报的。根据三角投影关系,并考虑到星载时钟存在偏差,从而得到脉冲星导航基本方程(如图1所示)。该方程有4个未知数,包括3个位置坐标分量和1个时钟偏差量。如果同时探测4颗脉冲星,那么就可以建立4个方程来求解4个未知数,这称之为几何定轨。实际上,在大气层外空间的航天器是按照轨道力学规律飞行的,所以利用航天器轨道动力学模型和导航滤波处理方法,每一个弧段仅需要探测1颗脉冲星,就可以确定航天器的位置和时间参数,这称之为动力学定轨。
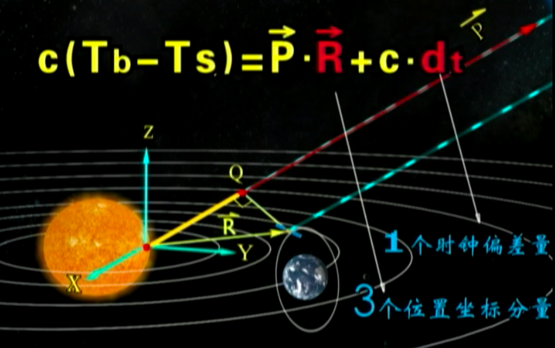 图1 脉冲星导航的基本原理
图1 脉冲星导航的基本原理
考虑到脉冲星辐射的X射线信号(光子)流量较低,需要一定的信号积分时间,才能提取具有足够信噪比的脉冲轮廓;脉冲到达时间测量精度不如卫星导航时间测量精度高;以及航天器同时携带多个探测器和跟踪多颗脉冲星尚有一定的实现难度等因素,因而利用几何定轨方法的航天器轨道测定精度较低。从实际工程应用角度,一般采用动力学定轨方法,这有利于提高导航参数估计精度;可以通过轨道力学模型实时外推计算航天器的轨道参数;毋需同时探测4颗以上脉冲星,每一个弧段仅需要探测1颗脉冲星。可见,脉冲星导航拥有一整套严密的理论推导和导航滤波处理方法。
在“脉冲星导航,精度10米?别逗了!”一文中,简单地利用“脉冲到达时间残差乘以光速”就得到所谓的“脉冲星导航不能逾越的固有精度”。这显然是缺乏导航数据处理的基本常识,是对脉冲星导航概念和原理的错误理解。
为什么说脉冲星导航最终精度可达10米?
脉冲星导航是利用脉冲星辐射的X射线信号为航天器提供自主导航信息服务。目前,国际公开的脉冲星数据大多为射电频段观测数据,以及部分空间天文卫星探测的X射线数据。由于这些数据并非是针对脉冲星导航应用而专门探测的,因此利用其进行导航分析计算,往往会得出片面的和悲观的结论。
那么,在什么样的条件下脉冲星导航精度可以达到10米呢?这就是数值试验的基本条件。在脉冲到达时间测量精度为0.1微秒,脉冲星计时模型精度为0.1微秒,到达时间转换精度为0.1微秒,以及脉冲星角位置精度为0.1毫角秒的条件下,脉冲星导航精度就可以达到10米。在航天器长时间高精度自主导航应用中,导航星座卫星对实时轨道确定与时间同步精度的要求是最高的,分别为10米和1纳秒水平。这就是10米精度指标的应用需求,具有重要的工程应用价值和科学研究意义。
依据上述数值试验条件,采用Walker 24/6/1导航星座构形和反馈滤波处理方法,分析计算得到导航星座卫星三维轨道误差、径向轨道误差和时间同步误差序列分别如图2、图3和图4所示。通过方差统计分析得到,星座卫星的三维轨道精度、径向轨道精度和时间同步精度分别为10.02米(1σ)、1.45米(1σ)和0.74 纳秒(1σ)。顾及星座卫星轨道和时钟误差,计算得到基于X射线脉冲星的导航卫星用户测距误差(URE)序列如图5所示。URE是评定导航星座自主导航性能的关键性指标。从图中可以看到:URE值均小于6米,能够满足用户导航定位应用需求。
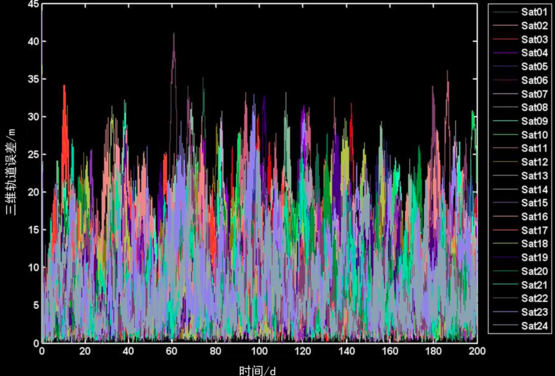 图2 三维轨道误差序列
图2 三维轨道误差序列
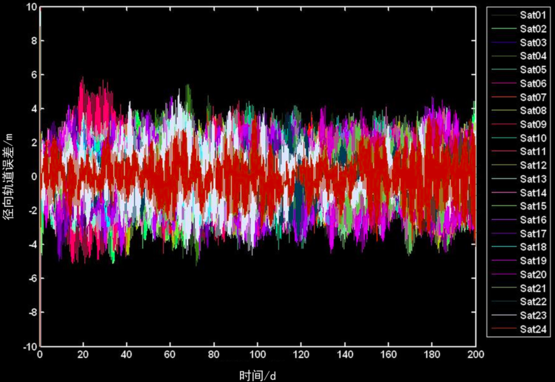 图3 径向轨道误差序列
图3 径向轨道误差序列
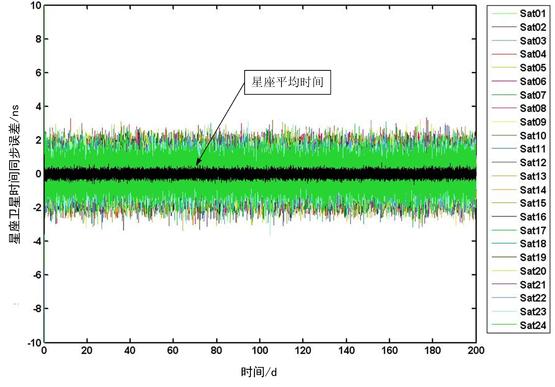 图4 时间同步误差序列
图4 时间同步误差序列
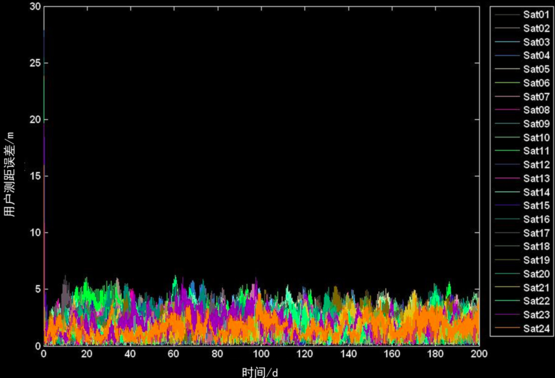 图5 用户测距误差(URE)序列
图5 用户测距误差(URE)序列
数值分析研究结果表明:脉冲星导航的最终精度可达到10米,以满足导航星座长时间高精度自主导航应用需求。
因而,在“脉冲星导航,精度10米?别逗了!”一文中所谓的“原则上和理论上就不存在脉冲星导航精度达到10米的可能性!”,显然是一种缺乏理论依据和数值分析研究的个人偏执和主观臆断。
脉冲星导航到底行不行?
脉冲星导航需要研究解决三大问题:一是脉冲星探测问题,需要研制超大面积的数据库型探测器和轻型化的导航型探测器;二是星际航图构建问题,就是通过以主载荷为超大面积探测器的空间基准星座组网探测,快速构建满足脉冲星导航工程应用需求的数据库;三是大尺度导航问题,就是要在广义相对论理论框架下解决如何实现弯曲时空的高精度导航问题,这是与基于经典牛顿力学理论的地球空间卫星导航的本质区别所在。
这些问题目前尚未得到彻底解决,但是从航天技术发展的历程来看,通过技术攻关研究都是可以解决的。上世纪50年代初期,苏联要研制人造地球卫星,就有人认为当时的技术条件不具备,并坚决反对,说“发射卫星,那是儿孙辈的事”。事实胜于雄辩,1957年苏联成功发射了第一颗人造地球卫星。
应该指出,脉冲星导航技术研究的创新性强,难度大,既有机遇,也有挑战和风险,是一项长期发展的事业。脉冲星导航到底行不行,目前谁也不知道。因此,我们才要发射试验卫星,从解决探测器的问题入手,进而验证脉冲星导航系统技术体制的可行性,后续还需要做大量的研究工作。
X射线脉冲星之所以能用于航天器自主导航,看重的就是其长期的周期稳定性。脉冲星时间系统具有如下基本特征:
(1)脉冲星的脉冲周期(自转周期)具有很好的均匀性。
(2)脉冲星能够连续长期自然地运动和辐射信号,在太阳系中任何时间和任何地方,都可以通过观测数据处理来获得稳定的脉冲信号。
(3)脉冲星的脉冲到达时间和脉冲星时钟均可用精确的数学模型来表达,具备一般学科的数学描述特征。
(4)借助辅助装置使脉冲星时具有计数和显示特征。
可见,脉冲星导航并非只有脉冲星作为时钟的导航,脉冲星时钟是没有显示装置的,需要星载原子钟来复现。可用原子钟进行时间间隔短期刻画,而脉冲星时间用于长期校准。
因而,在“脉冲星导航,精度10米?别逗了!”一文中所说的脉冲星计时模型的短期稳定性问题,并非脉冲星导航实现的根本性问题,从具体工程实施层面,可采取多种方案加以解决。
结论
综上所述,脉冲星导航是实现航天器的自主导航,最终精度可达到10米,具有重要的工程应用价值和科学研究意义。但是,脉冲星导航到底行不行,目前谁也不知道。
“实践是检验真理的唯一标准。”只有通过脉冲星导航空间飞行试验,才能实测验证脉冲星导航系统体制的可行性,并通过长时间的努力,才能达到最终的精度指标。
参考文献:
- 帅 平、李 明,等,编著,X射线脉冲星导航系统原理与方法[M],北京:中国宇航出版社,2009。
- P. Shuai & M. Li et al., A New Approach toSolve Rotation Issue of Autonomous Navigation Constellation [C]. The 58thInternational Astronautical Congress, Hyderabad, India, Sept. 24~28,2007.
- S.I. Sheikh, The Use of Variable CelestialX-ray Sources for Spacecraft Navigation [D], Doctoral Dissertation, Universityof Maryland, USA, 2005.
- 顾诵芬、史超礼,主编,世界航天发展史[M],郑州:河南科学技术出版社,2000。