

| DIYer: | Matt Mets |
|---|---|
| 制作时间: | 5小时 |
| 制作难度: | ★★★★☆ |
| GEEK指数: | ★★★★☆ |
在这里我们将为大家带来一棵机器植物幼苗,它将通过微控制器的“大脑”来检测环境的变化而成长,到了一定时候还会开花。听起来不错吧?整个项目都在一个普通的花盆中完成,而多亏了我们的节能设计,仅仅依靠一组五号电池,这棵小小的植物持续数个月甚至数年都能生长开花——也就是说,你可以把它放在你的窗台上,并在很长的一段时间内感受开花时的喜悦~
1 先来看看这个原理
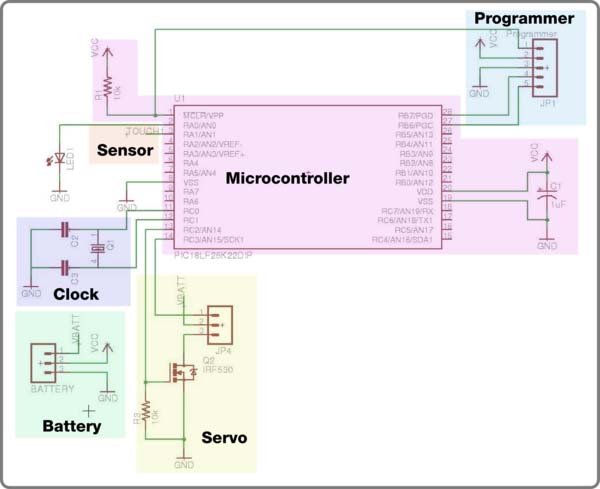
● 我们请来了《Make》杂志的插画师 Damien Scogin 画了这幅原理图,好让朋友们更好地理解这个机械植物的设计结构和工作原理。哈哈,够酷吧?如果已经动心,就马上开始动手吧!
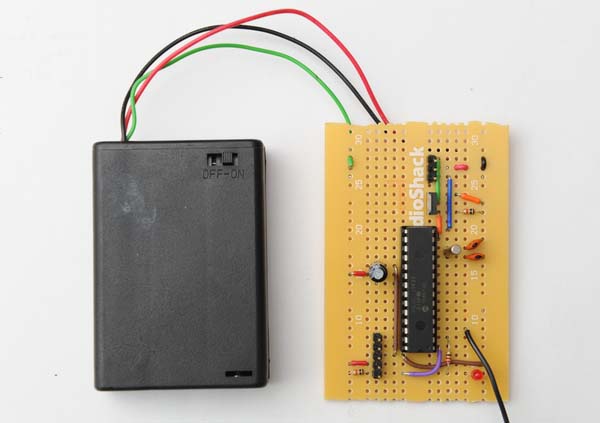
2 制作机械植物的“大脑”
2.1 工具和材料

● PICkit 3 程序设计器(用于给处理器编程)
● 电烙铁(带焊锡)
● 剪线钳
● (可选)1/16 英寸钻头电钻
○ 18lf25k22 处理器(Digi-Key 商品编号 PIC18LF25K22-I/SP-ND)
○ 28 引脚的芯片插座(Digi-Key 商品编号 3M5480-ND)
○ 0.1 英寸接头(Digi-Key 商品编号 A26509-40-ND)
○ 10 千欧电阻器(Digi-Key 商品编号 10.0KASCT-ND)
○ 220 欧姆电阻器(Digi-Key 商品编号 220QBK-ND)
○ 1 微法旁路电容器(Digi-Key 商品编号 P5174-ND)
○ 32.768 千赫兹晶振(Digi-Key 商品编号 631-1205-ND)
○ 2x 22 皮法电容器(Digi-Key 商品编号 VY1220K31U2JQ63V0)
○ N 沟道场效应晶体管(Digi-Key 商品编号 NTD4960N-35GOS-ND)
○ 3 毫米红色发光二极管(Digi-Key 商品编号 754-1218-ND)
○ 22 美国线规实心导线
○ 改装过的 3 节五号电池仓(Digi-Key 商品编号 SBC331AS-GRN-ND)
○ 3 节锂离子电池(Digi-Key 商品编号 N602-ND)
○ 原型电路板(RaidoShack 商品编号 276-170)
○ 连续旋转伺服电机(Digi-Key 商品编号 900-00008-ND)
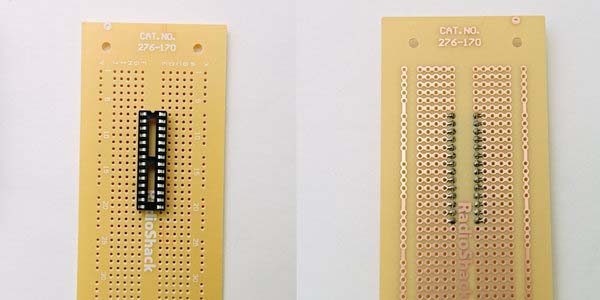
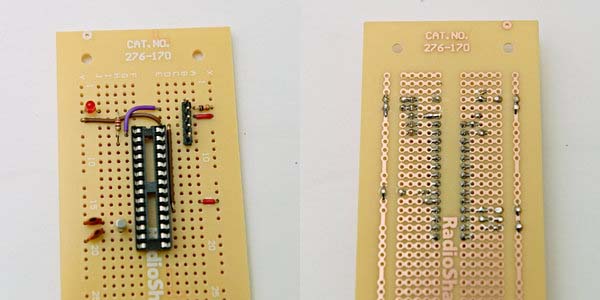
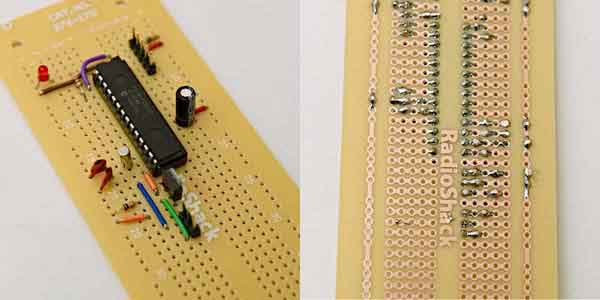
2.4 b. 布置接头和电线
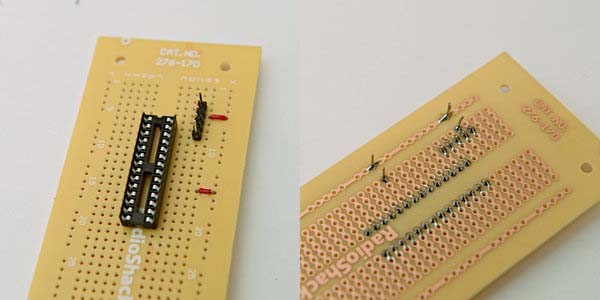
● 我们将使用电路板右侧的一排连接端子(在 Radio Shack 电路板上标有叉状记号)供电,而左侧一排接地。
● 将芯片插座的 20号引脚和程序设计器接口的 2 号引脚用导线连在供电端。
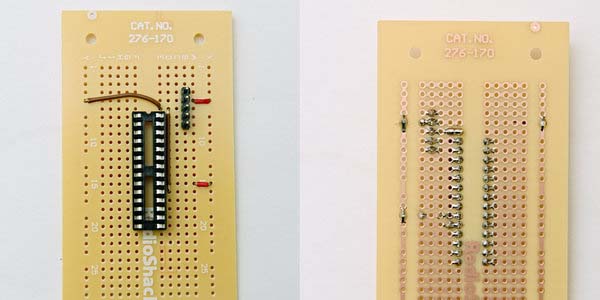
2.6 d. 复位线
● 接着,我们需要将复位线连到处理器上,这样程序设计器才能正常工作。
● 从芯片插座的 1 号引脚引一根导线到程序设计器接头的 1 号引脚。
● 串联一个 10 千欧电阻器再连到供电端。这样一来,当程序设计器连好了以后,它就能通过电阻器重置微控制器,而当它断开链接时,微控制器就会持续工作。
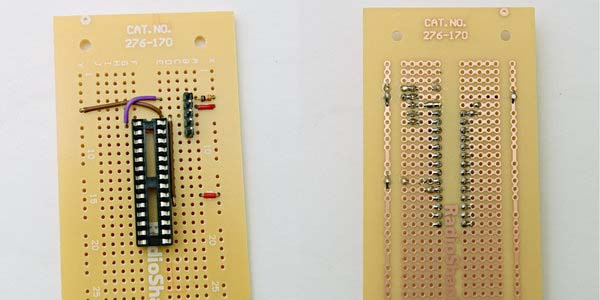
2.7 e. 时钟电路
● 在这个项目中,我们将使用一个外部晶振来维持时钟频率,以确保这棵植物能维持正确的时间。
● 将晶振接在微控制器的 11 号引脚和 12 号引脚之间(正负极无所谓)。
● 在这两个引脚各接一个 22 皮法的电容器,然后都接地。
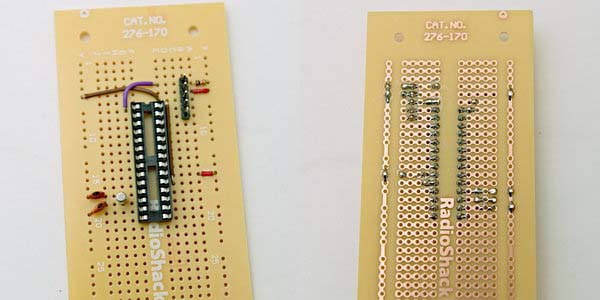
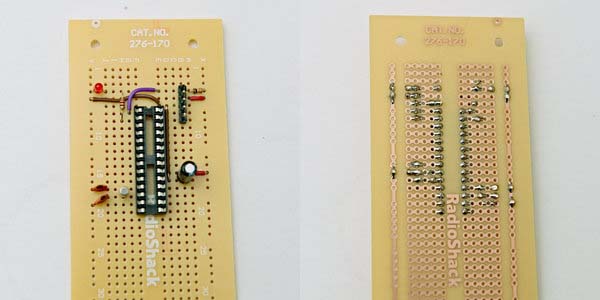
2.8 f. 状态指示 LED 灯
● 我们来加上个状态指示 LED 灯,好让我们了解这个工程是否在正常工作。
● 从芯片底座的 2 号引脚连上一个 220 欧姆电阻器,接在原型电路板的闲置端口上。
● 从该端口连上一个发光二极管,再连到接地端,请务必确保发光二极管的负极(短线)接地。
2.10 h. 测试
● 让我们先撇开电烙铁,测试一下我们的电路是否能正常工作吧!
● 将微控制器插入芯片插座,然后将程序设计器和程序设计器接头连起来(请注意程序设计器的 6 号引脚并没有连接上,因为它在这个电路中并不需要)。
● 从 这里 下载程序代码(压缩文件),浏览一下,然后将它烧录到微控制器中。如果一切正常,状态指示 LED 灯就应该每隔一秒一明一灭了。
2.11 i. 伺服电机接头
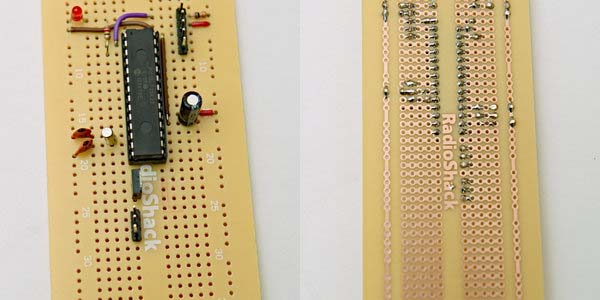
● 我们最后需要在项目中加入的东西是用于控制伺服电机的电路。
● 将晶体管靠近芯片插座,安置在原型电路板上(在它们之间留出一排即可),请确保晶体管的 1 号引脚离芯片插座最近。
● 将伺服电机接头安置在晶体管的旁边,还是空出一两排来。
2.12 j. 伺服电机电路
● 我们需要将微控制器和伺服电机之间的电路连好。我们要把两个部分连入电路——用于控制伺服电机电源开关的晶体管,和连接伺服电机的伺服电机接头。
● 让我们先来连接晶体管。将微控制器的 13 号引脚和晶体管的 1 号引脚(基极)连起来。这样微控制器就能够给晶体管通电了。
● 为了预防意外,我们要在晶体管的 1 号引脚和地线之间连入一个 10 千欧的电阻器。这个电阻器作为下拉电阻,保证晶体管不会在微控制器引脚断开连接后被意外导通。
● 我们要从晶体管的 3 号引脚(发射极)引一根导线接地。
● 从晶体管的 2 号引脚(集电极)引一根导线和伺服电机接头的 3 号引脚(地线)连接。晶体管就能通过断开其接地连接来控制伺服电机的关断了。
● 从微控制器的 14 号引脚引一根导线和伺服电机接头的 1 号引脚(信号线)连接。微控制器就能通过这条线生成命令信号,来控制伺服电机的状态了。
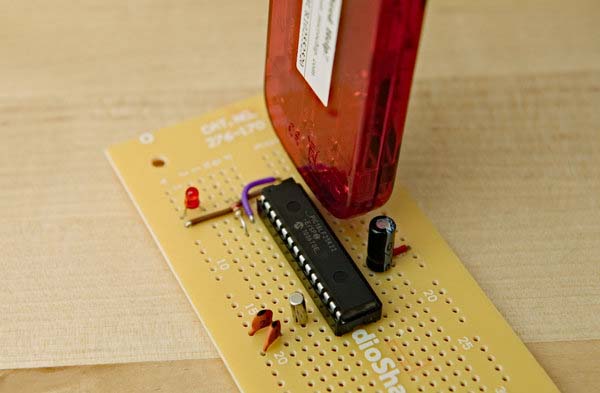
2.13 k. 电池

● 我们组装机械植物大脑的下一步是连接一个改造过的电池仓。
● 这里需要连三根线——地线(黑色)需要和接地端连接,+4.5 伏线(红色)要和伺服电机接头的 2 号引脚连接,而 3 伏(绿色,或者你所用的任何颜色)和供电段连接。
● 你可以直接把这几根线焊死,不过这次连接中更可靠的方法是将绝缘的导线穿过电路板上的一个一个孔洞,以消除应变,然后再把末端焊在穿孔纤维板上。
● 你也许需要把孔洞扩大才能让绝缘导线穿过,你可以用1/16 英寸钻头电钻搞定。
2.14 l. 触摸传感器线
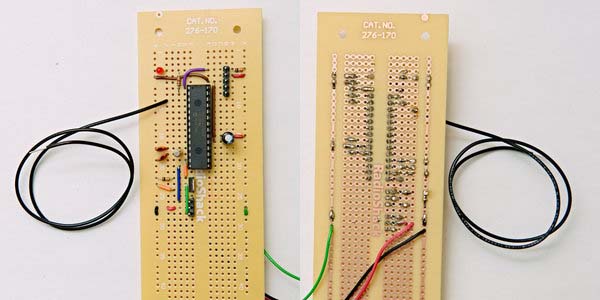
● 制作机械植物大脑的最后一步是加上一根触摸传感器的导线。
● 由于 PIC 内置了很好的充电时间测量单元(CTMU),通过一些巧妙的程序和单根导线就能够用它检测人体触摸。
● 将一小段导线(6 英寸较好)连在微控制器的 3 号引脚上。在导线的另一端剥开半英寸长的绝缘套,留出一段金属丝作为裸露的触摸开关。以后我们会把它连在一个更像样的按钮上。
2.15 m. 完成!
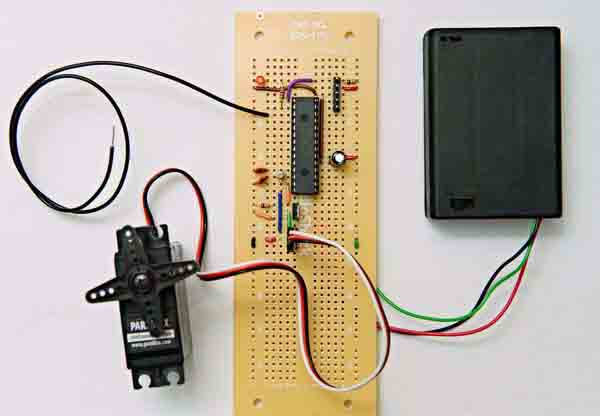
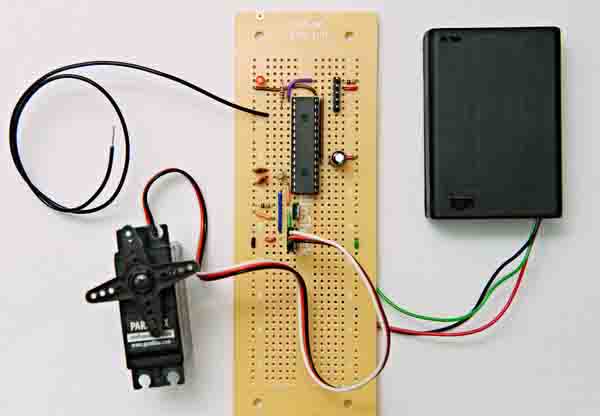
● 现在就是验证成果的时刻了!请反复检查你的接线,确保无误,然后连上伺服电机,让电池开始供电。
● 状态指示灯应该会继续每隔一秒一明一灭,而伺服电机应该会向着一个方向旋转,并在传感导线被触摸时改换方向。
● 如果一切工作正常,恭喜你成功了!你已经充分准备好在之后的步骤中以此为基础添加更复杂的部件了。
● 如果有什么地方发生了问题,请蛋定——反复检查你的连线,如果你无法找出问题所在,可以到论坛上发帖子问!还有,有可能触摸传感器需要经过校准才能可靠地工作。
3 制作植物的茎秆

3.1 工具和材料
● 带有切割刃的旋转刀具
● 螺丝起子
● 手钻,带有各式小钻头
● 带有切割刃的旋转刀具
● 多用途小刀
○ 完成了的机械植物大脑,或者别的可以控制伺服电机的微控制器
○ 连续旋转伺服电机(Digi-Key 商品编号 900-00008-ND,12.99 美元)
○ 便宜的卷尺
○ 短螺钉,用于将伺服电机的机臂和卷尺连接起来。
○ 花盆(直径大约 8 英寸)
○ 胶带
○ 胶水
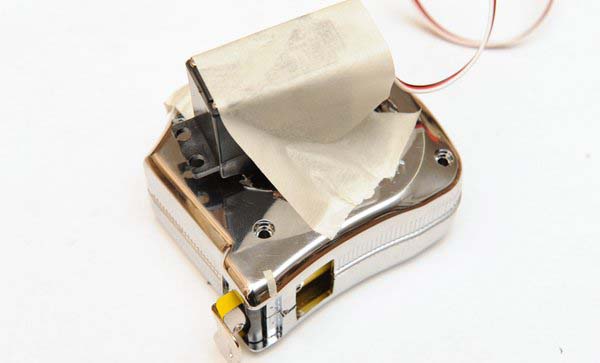
3.2 a. 肢解卷尺

● 我们的卷尺拆起来很方便——只需要卸下背后的四颗螺钉就行了。在移开卷尺顶盖时要小心些,因为里面整个都是被受载弹簧拉紧的,可能突然松开变成一团乱糟糟的金属条。我们在使用卷尺时通过遮护胶带让它团在一起。
● 给塑料小人添加眼睛。
● 我们惊喜地发现卷尺里有这个塑料小人,伪装成控制杆之类的东西。这并非有技术含量的一个步骤,不过如果你在你的卷尺里也发现了类似的小人,也许你也会有兴趣把它拿出来,配上两个眼睛!
咳咳……Matt,别跑题了…
3.3 b. 给伺服电机留位置

● 在移除了卷尺的背部以后,接下来就是在上面切开一个足以放下伺服电机的洞来。
● 我们发现最简单的方法是将分档器本身放在上面,然后标记出它所能达到的范围,绘出一个圆形,再用旋转刀具挖出这个洞。把洞扩得略大些是个不错的主意,这样可以给它一些振动的空间。
3.4 c. 将伺服电机的机臂和卷尺座相连

● 下一步是将舵机臂(就是伺服电机配备的十字形零件)和卷尺座连接起来。首先,在卷尺的一端绑上遮护胶带,避免它退卷。接着,小心地从卷尺外壳的背面将卷尺分离开来。
● 在卷尺中央有个隐藏的回弹弹簧(就是这玩意儿让卷尺缩回壳子里去的),你可能需要将它切断才能把它从卷尺背面分离开来。| ● 取出卷尺后,你就可以用一些小螺钉把舵机臂和它连接起来了。尽可能地对准它的中心,好让它能平滑地旋转。
● 我们用的螺钉比舵机臂孔略微大了点,所以我们用手钻将这些孔扩大了些。
3.5 d. 装配伺服电机,并把卷尺放回去
● 现在,把伺服电机固定在卷尺上。
● 这里唯一的技巧在于卷尺的顶盖要位于伺服电机和卷尺之间,除非你挖的那个洞非常大,否则你必需在将伺服电机的机臂重新连到伺服电机上之前就把顶盖放好。当固定好卷尺以后,重新把卷尺和外壳组装起来。我们把卷尺的锁定机构拆除了,这样一来它们就不会影响伺服电机的运作了。
● 这时你可以把伺服电机和植物大脑连接起来,这是个确定组装是否正确的好办法。
● 给伺服电机接通电源(请确保接线正确——白色的控制线应该和距离微控制器最近的引脚相连),然后启动机械植物大脑。触摸传感器线,激活伺服电机,它应该会让卷尺一伸一缩。
● 如果一切运行正常,现在你就可以断开电源,把机械植物大脑拆下来了。
3.6 e. 制作纸板支座
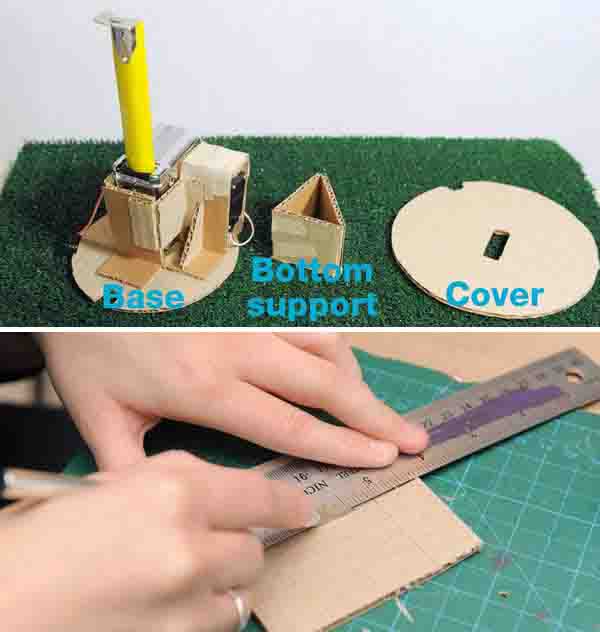
● 这一步依据你使用的花盆以及卷尺而有所不同。基本思路是将卷尺/伺服电机组装件夹在两块纸板之间,然后用一些垂直放置的纸板将它们定位。我们还制作了个三角支撑板,放在花盆底部和卷尺底座之间。
3.7 f. 组装与测试
● 经过一番摆弄与调整之后,一切都应该整齐地蜗居在你的花盆中了。
● 最后一步就是连上机械植物大脑,然后放手一试!启动机械植物大脑,然后触摸传感器线。如果一切正常,那么卷尺就会从植物的基土中伸出来,然后又缩回去。
● 我们将给我们的植物顶端加上一朵盛开的鲜花吧~
4 制作机械植物的花朵
4.1 工具和材料
● 剪刀
● 多用途小刀
● 剪线钳
● 针头钳
○ 机械植物大脑
○ 机械植物根茎
○ 硬卡纸,或者类似的厚实纸张
○ 硬纸板
○ 22 美国线规的围栏铁丝
○ 钓鱼线或者丝线
○ 胶水(白乳胶)
○ 硬卡纸部件样板(在一张宽 8.5 英寸、长 11 英寸的纸上打印好,或者直接打印在硬卡纸上)
4.2 a. 裁剪
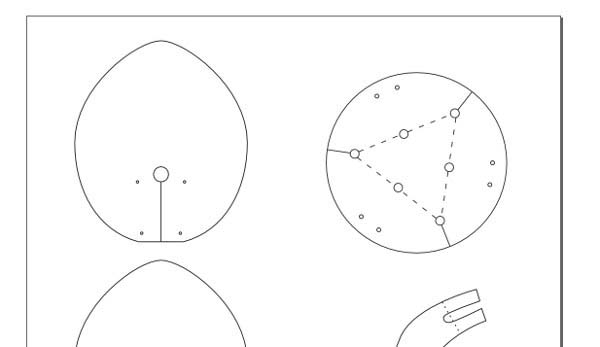
● 下载 部件样板 ,把它全尺寸(宽 8.5 英寸、长 11 英寸)打印出来,然后用它在硬卡纸上裁剪出你所需的部件。在花朵部分你可以用彩色纸张,或者自己涂色。我们用丙烯颜料涂了色,把内外两面的颜色涂成了不一样的。
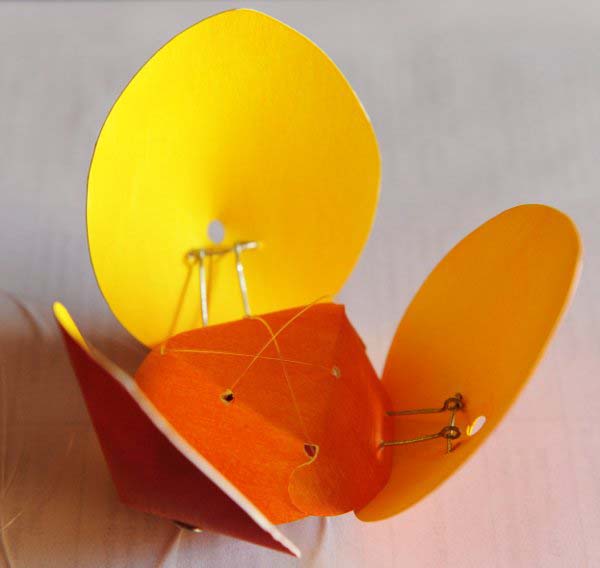
4.3 b. 组装花瓣

● 当你把它们剪下来以后,花瓣部分是很容易组装的。你所需要做的只是让花瓣末端弯起来,使末端的两个孔重叠,然后在这之间涂上些胶水,让它定位就行了。图中示出的是剪下的花瓣和花朵基座。
4.4 c. 弯制花朵基座的铰链线

● 接着,我们需要弯制一些线,作为花朵基座上的铰链支架。
● 用剪线钳剪下三条大概 2 又 3/4 英寸长的钢丝线。
● 用针头钳把它们弯成 U 型,每个 U 字的末端大约 1 英寸长,中间段的长度大概在 3/4 英寸。
● 在垂直于U字形的方向上扭转这些线,好让这些铰链支座立起来。你可以看看下一步的图片了解如何扭转它们。

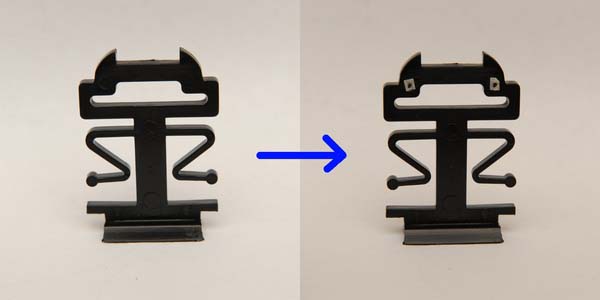
4.6 e. 用纸贴住基础线头
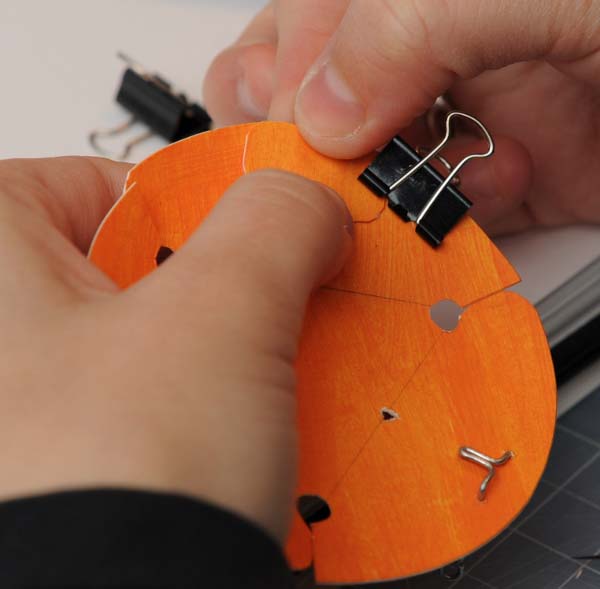
● 现在,在线上涂些胶水,用纸把它们固定住。这些纸到时候是看不见的,所以不需要上色,不过我们有些涂色纸的余料,所以就废物利用了。
● 请注意:如果你有装订夹,那么可以用它们来夹住纸张,等待胶水变干。

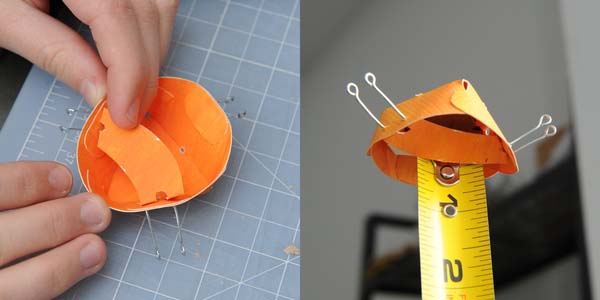
4.8 g. 制作卷尺装配平台

● 现在,我们要制作一个装配平台,让花朵基座和卷尺端部连接起来。
● 剪下一个三角形的硬纸板,大小要刚好足够放入花朵基座中,然后把三个角剪掉。把它一半折在硬卡纸里,形成一个口袋状。
● 在没有被包裹的硬卡纸和硬纸板之间涂上胶水进行固定。
● 在硬卡纸口袋上剪出一道口子,让卷尺端部可以插入,而卷尺端部大致位于三角纸板的中央。
● 在三角纸板的每一条边的中点剪出一道槽,给用来使花瓣展开的钓鱼线留出空间。
4.10 i. 花瓣的连接和连线!
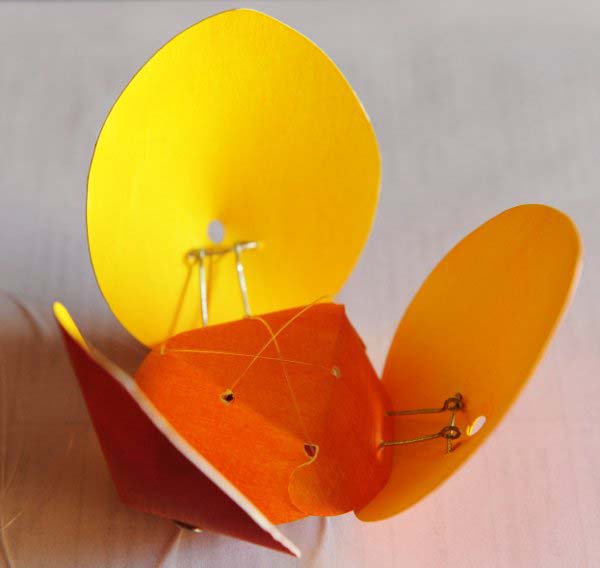
● 用一根 1.5 英寸长的金属线穿过花瓣的一边,通过花朵基座上的两个孔,再穿到花瓣另一边,这样固定好三个花瓣。
● 在线的每一端弯出一个环,让线固定住。如果一切正常,花瓣应该可以轻松地开合。
4.11 j. 装上植物根茎

● 我们将在下一步讲述如何定位花朵,并让植物开花,不过目前你可以把花朵放在根茎上,感受一下完成品的样子!你也可以拉一下钓鱼线,感受一下开花机制的工作状态。
● 如果一切正常,花瓣应该可以轻松地开合。最后,给每一片花瓣连上一根若干长度的钓鱼线或者丝线。这条线是用来让花朵绽放的,在植物生长时线就拉紧,从而拉开花瓣。
● 把线系在花朵的底部,然后向上穿入花朵基座里面,然后从顶部最近的那个孔中穿出,从花朵基座的顶部向下绕到另一边。
● 听着很绕吧~最终要的效果就是当你拉线的时候,花瓣应该会向外展开,除非你手动把它合上,它就一直盛开着。
5 最后的组装
5.1 工具和材料
● 烙铁和焊锡
● 美工刀
● 金属丝剪子
● 长鼻钳
○ 植物的脑袋、植物的根茎和折纸花朵
○ 1平方英尺的人造草皮
○ 22 AWG的围栏铁丝
○ 热熔胶或者其他粘合剂(双面胶带、环氧树脂粘合剂等等)
○ 发光二极管(红色或绿色)
○ 220欧姆的电阻
○ 钩线

5.4 c. 给电阻式触摸传感器添上引线
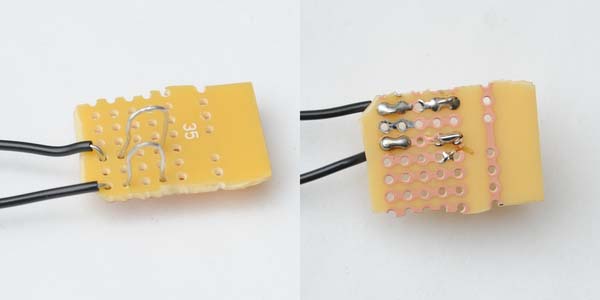
● 在电路板上焊上两个线环,将从左数起第四条和第六条端子连接起来。
● 用8英寸长的线,以保证长度足以将它们连接上主电路板。线环本身应该至少有1/4英寸高,好让它们能从草皮下面冒出来。
● 中间的线环要接地,而外侧的线环要连在传感器上。
5.5 d. 添加一个状态指示LED灯
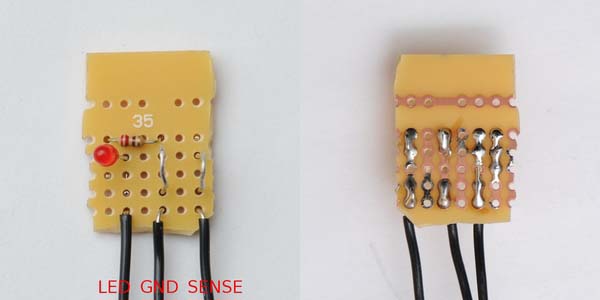
● 我们的主电路板已经有了一个状态指示LED灯,不过当把它埋入花盆中后我们就看不到它了。
● 给触摸感应板添上一个新的指示灯,这样当开关被碰到的时候会发出反馈的灯光信号。
● 将220欧姆的电阻接入第一条和第四条端子之间,用作LED灯的限压器。
● 将LED灯接入第一条和第二条端子之间,其正极(较长的引线)连在第二条上。
● 将一个8英寸长的导线焊在第二条端子上,通过它让微控制器控制LED灯的亮暗。
5.6 e. 将它连上主电路板
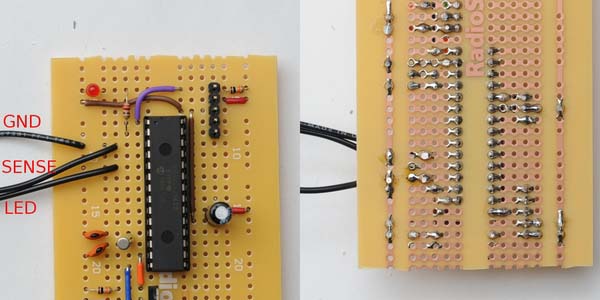
● 最后一步电路工序是将感应板连接在主电路板上。
● 将地线焊在主电路板上的接地口上,将信号线焊在微处理器的3号引脚上。
● 将LED的线路焊在微处理器的5号引脚上。启动后我们的样例电路就会对触摸传感器作出反应了。
● 如果你计划添加些额外的传感器(例如光、温度、湿度传感器等等),你也许该趁着现在还没组装上植物将它们连接上去。
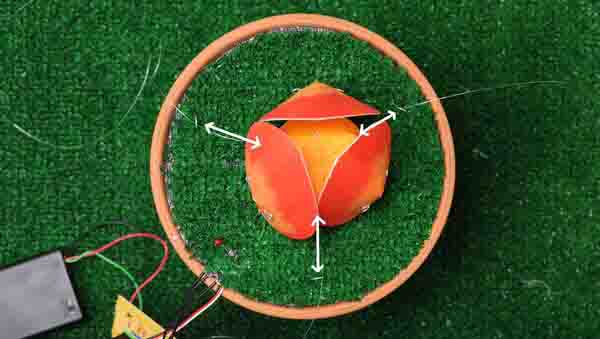
5.7 f. 裁出一块圆形的人造草皮,然后加上线锚。

● 既然基础电路已经完成了(哇噢!),是时候开始最后的组装了。
● 裁剪出一块和厚纸板表面相同大小的人造草皮来,还要在上面开出和卷尺宽度相当的穿孔。
● 利用围栏铁丝在草皮上制作线锚,钓丝就是连在这上面。当植物的根茎生长出来的时候,这些锚将拉住钓丝,而钓丝就会让花瓣绽放开来。这些锚应该开在距离花盆边缘约一英寸的地方,各相隔120度,正对着花瓣。
● 如图所示是我们组装后的样子,可供参考:
5.8 g. 装上触摸传感器
● 下一步是将触摸感应板装上去,并把厚纸板基“土”和人造草皮固定起来。
● 用美工刀在草皮上刻出三道小口子,让两条端子和LED灯的导线从口子里伸出来。
● 当感应板放置好了以后,用热熔胶将厚纸板和人造草皮粘合住。这样会增加些重量,好让草皮在植物根茎生长出来时不被拽起来。把各个部件装回到花盆里,不过暂时先把电路板放在花盆外面。
5.9 h. 调节伺服电机

● 现在,将程序写入器连在电路板上,然后调节伺服电机的定时,让它在你按下触摸开关时升起或落下的距离变得合适。
● 在样例程序中的缺省值设置时可以让我们的花朵根茎上升8.5英寸,看起来很适合我们的这棵机器植物。你也可以对你的植物进行试验,找出一个合适的高度。
● 请注意:你可以轻松地将卷尺从植物基“土”中拉出来,不过要想收回去还是要让伺服电机出马。我们觉得最简单的调试方法是将“下降”阶段调节得比所需时间略长,然后再将“上升”阶段调节到最佳高度。
5.10 i. 拴住花瓣

● 既然花朵的高度已经调节好了,最后一步就该是拴上钓丝,这样花瓣就会自动绽开了。
● 将花儿升到最大高度,然后用钓丝缠绕在相应的锚上,接着用钓丝结将它拴好。
● 请注意:如果你手头有些夹具,那么你可以在拴住之前先测试一下能否正常活动。

5.12 k. 扩展!

● 我们目前完成的基础植物有着一个非常简单的开/关触摸传感器,不过除此之外它没什么别的功能了。
● 秒级精度的计时器可以轻松地让它在特定的时间开花。
● 额外的输入/输出接口可以连接上其他的环境传感器,例如用作数据记录的温度传感器、光传感器,或者湿度传感器。
● 它还可以连上电脑,对虚拟环境作出反应。
创新永无止境!你会把你的机器植物设计成什么样子呢?
6 DIYer签到处
连卷尺都能抽芽开花~摆在家里绝对是个励志的主题!动手做一个吧!
| 翻译: | 白之牙 |
|---|---|
| 编辑: | Cosmodox |
果壳DIY站QQ群:132647923
果壳DIY站微博: http://t.sina.com.cn/guokrdiy