
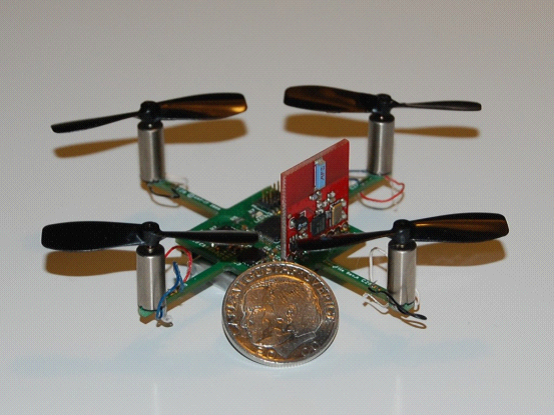
我们在制作一个非常袖珍的四轴飞行器,就用PCB作为承力结构。第一个版本被命名为疯狂直升机。
它的主要特点有:
- STM32 Cortex-M3 CPU
- 3轴加速度计
- 1轴/2轴陀螺仪
- Nordic 2.4GHz 射频通信芯片
- 电动机,螺旋桨和银辉(Silverlit)X翼模型飞机的电池
这架直升机可以从电脑上通过USB无线适配器遥控。我们制作了三架样品(每个成员各一架),并完成了大多数的固件程序。
为了达到稳定飞行的目的,还需要解决一些控制上的问题,以及完成电脑上的控制程序模块。
更多的信息和实际飞行视频会在稍后公布:)
第一个飞行视频
这是直升机的第一段飞行影像。
控制系统工作的很棒,但是它仍然过于依赖操纵者的敏捷(见视频的结尾部分)。
这架直升机是通过PC机上运行的Python程序控制的,我们实际上用一个游戏机的蓝牙手柄来操纵它。
疯狂直升机四轴飞行器详述
像承诺过的那样,我们要在这里公布疯狂直升机(也是我们第一架四轴飞行器)的更多信息。
该系统的主要架构如下:
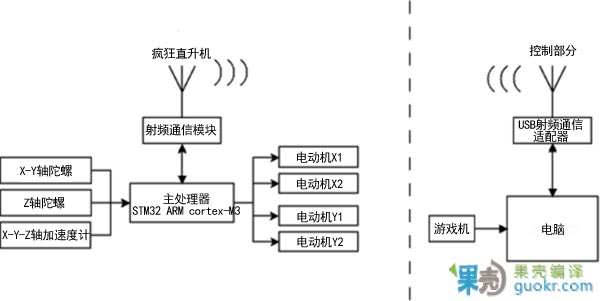
疯狂直升机的高层次系统图。
直升机本身是围绕CPU组织起来的。CPU的任务是读取物理传感器(陀螺仪和加速度计)的测量结果,给出控制信号控制电机,让直升机保持稳定。通过一个控制反馈回路,CPU每秒能够对电机发送250次调节转速的指令。无线通信的带宽需求很低,仅仅需要发送操作命令和接受遥测数据。CPU上运行的程序可以通过无线通信更新。
控制和遥测程序在电脑上运行,控制程序从手柄读取输入,然后向直升机发送命令。我们也有调节直升机上控制参数的程序模块,并且会记录下传感器的测量结果,方便调整控制回路。
所有这些开发工作在Windows或linux系统上完成。事实上有三个人同时在这个项目上工作,两个人在Linux上工作,剩下一个人主要使用Windows。利用自由/开源软件(FLOSS,Free/Libre and Open Source Software)许可对提高工作效率非常有帮助。我们主要使用GCC编译器编译直升机程序,GNU( GNU's Not Unix,一个包含了递归的缩写!GNU Linux工程是为与可复制﹑修改﹑和重新分配的源代码一起的类Unix操作系统的发展而建立的。)建立我们的工程,Mercurial(一个轻量级的分布式版本控制系统)管理我们的源代码,与直升机之间的通讯采用python/pyusb(一个python上的USB通讯软件库)。所有这些软件都能在linux和windows系统间来回无缝切换,使这个项目的管理变得容易许多。
电动机之间的距离(X轴和Y轴方向)大约有8cm,整个飞行器的重量只有20g。
电路板顶面的细节
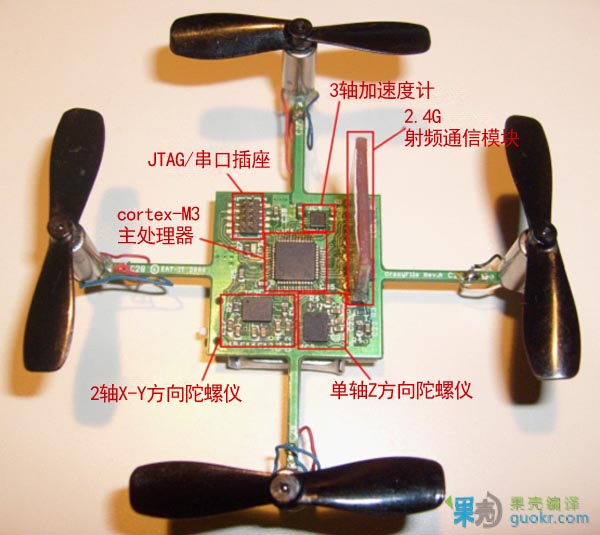
疯狂直升机电路板顶面细节
电路板顶面包含了传感器和控制/通讯电路。
- JTAG/串行接口用来向处理器编程,传送debug信息。
- CPU是STM32 Cortex - M3。时钟设定为内部振荡器64MHz。
- 2轴X-Y陀螺仪InvenSense IDG500。它的模拟信号输出连接到CPU的模数转换器。
- Z轴陀螺仪InvenSense ISZ500。和X-Y陀螺一样,模拟信号输出连接到CPU的模数转换器。
- 2.4GHz的射频通信基于Nordic的nRF24L01 芯片。它实际上是一个通过SparkFun出售的带接口电路板,通过SPI端口连接到CPU。
- 3轴加速度计是Bosch SMB380。它通过I²C总线连接到CPU。
电路板底面的细节
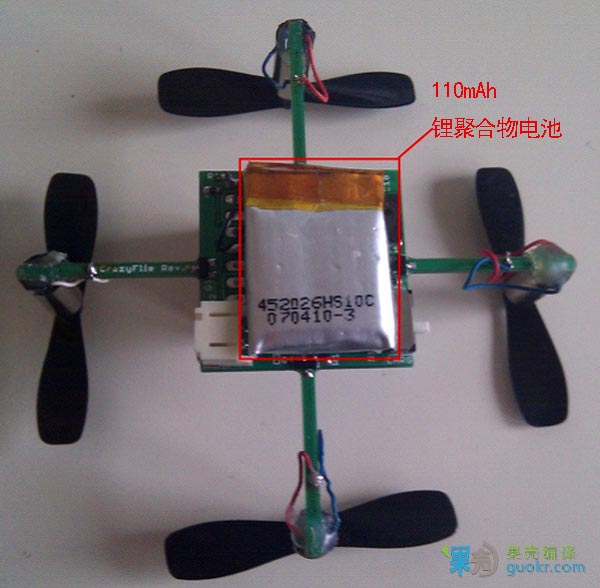
疯狂直升机电路板底面细节
这里没有什么特别之处,除了一小块电池通过胶带粘在电路板底面。这些电池来自一架Silverlit x-twin模型飞机,允许我们的直升机飞行4.5分钟。
电池下方的电路细节
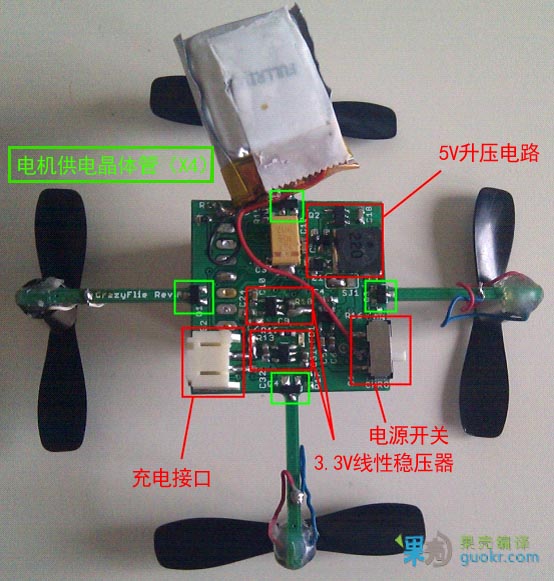
在电池下方是供电电路和功率控制电路。
- 充电插座连接外界的5V电源,给电池充电
- 电源开关切换直升机的电源供应(连接器/充电电池)
- 5V升压电路将3〜4V的电池电压升压到5V。
- 两个3.3V线性稳压器,从5V电压降压输出3.3V电压。数字和模拟3.3V供电电压相互独立。这是为了减少对模拟器件的噪声干扰(两个陀螺仪,设计中很重要的一部分)。
- 最后,在四个侧边正中有电动机的驱动晶体管。电能从PCB梁的顶部和底部布线传送,为电动机提供能量。
值得一提的是,我们在3.3V稳压器右边放置了电池充电芯片,这是一片常用的MAX1555,它工作的很好。
使用升压电路的目的在于在电池的基础上提供更加稳定的供电,在电池即将耗尽,电压开始下降时它特别有效,同时还能够减小电机驱动电路带来的噪声。但是说到底这些芯片使用2.8V线性稳压器供电就能工作,因此我们计划在下一个版本中取消升压电路,同时还打算把无线通讯模块也集成到电路板上。
电动机和螺旋桨都来自Silverlit x-twin模型飞机,它们直接由电池电压供电。
果壳DIY站QQ群: 132647923 (加入时请报上你在果壳的个人主页地址,以防广告ID)
果壳DIY站微博: http://t.sina.com.cn/guokrdiy