

| DIYer: | AntMan232 |
|---|---|
| 制作时间: | |
| 制作难度: | ★★★☆☆ |
| GEEK指数: | ★★★★☆ |
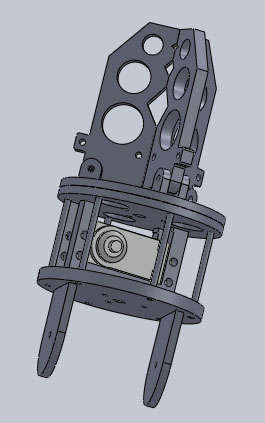
以下是这次的制作……爪子。
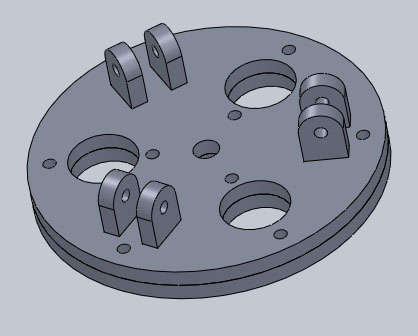
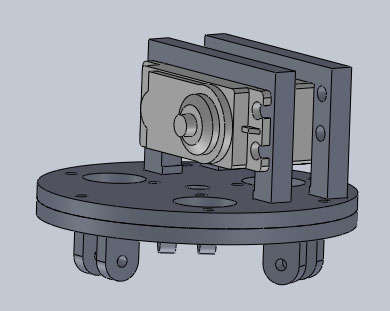
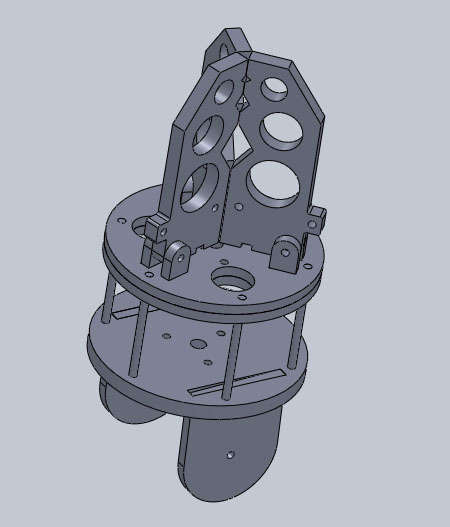
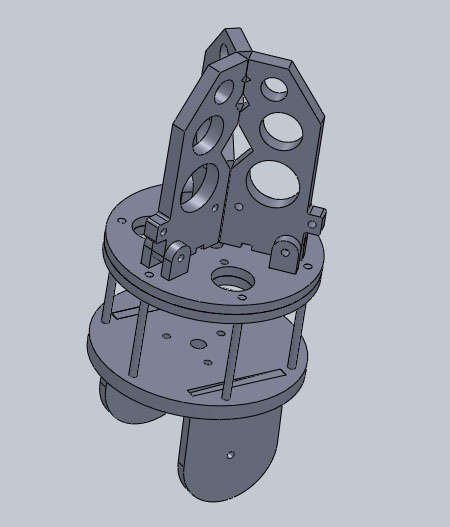
“爪子”就是我发明的超酷三指机器人爪子。它通过一台伺服电机进行控制,并且可以通过安装另一台伺服电机,将其作为“手腕”来使用。
如果你想看看它的庐山真面目,这里有一段视频:
(我才15岁,这是我参加NRW竞赛的作品)
双向电梯
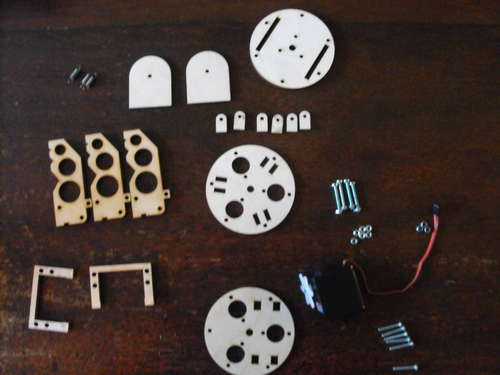
1 工具和材料
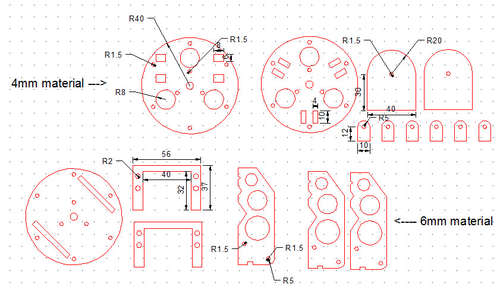
● 激光切割机
● 一台电钻
● 一台伺服电机
● 胶水
○ 3×3 毫米的螺栓
○ 3×3 毫米的尼龙防松螺母
○ 4×4 毫米的螺栓
○ 4×4 毫米的螺母
○ 一些多芯线
○ 一些 3mm 的榫钉
○ 3 个小的拉力弹簧
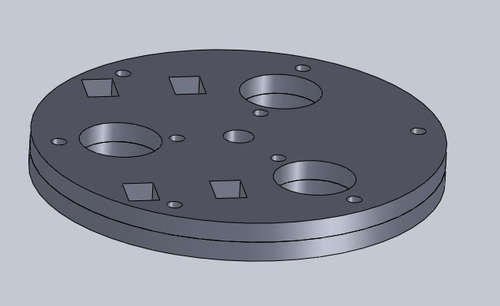


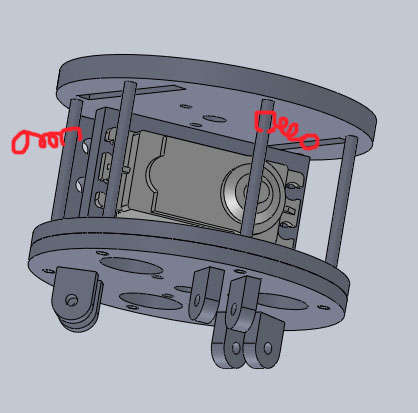
6 添加榫钉
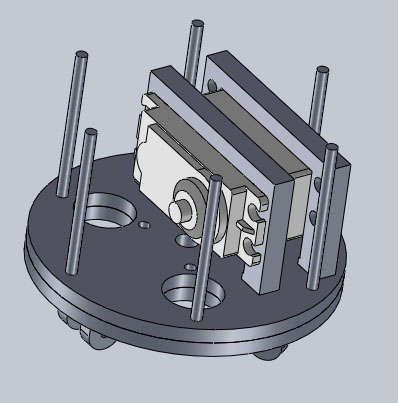
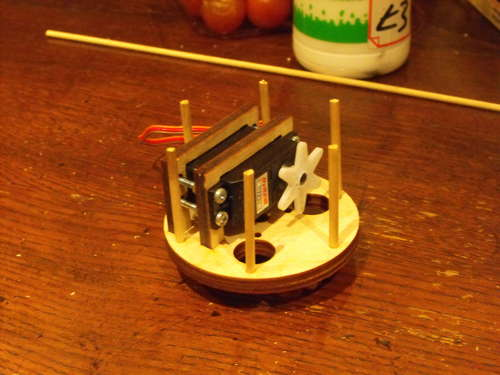
切割出6根50毫米长的直径3毫米的榫钉。将它们插入两块底板上的6个靠外的孔中,并且穿过去,让它们的顶端与伺服电机所在的反面相齐平。我发现用削铅笔的小刀来刮削榫钉的顶端可以很方便地保证它们与底板齐平。

9 添加钳夹
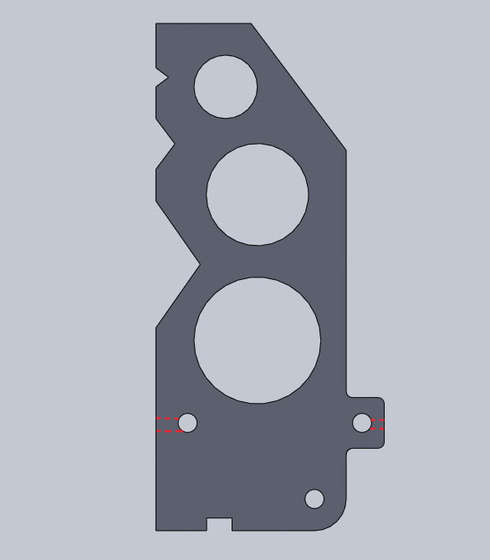
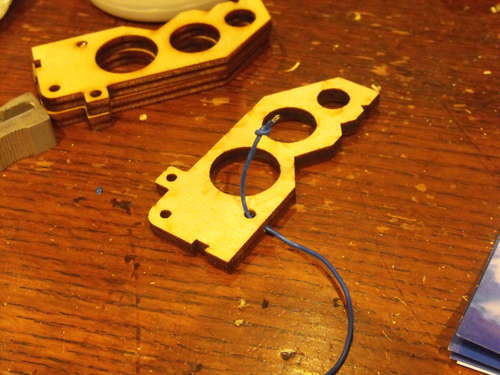
水平地在最靠近中央的孔中钻一个小孔。并且将另一个孔的每一个面都锉一下,好让弹簧能自由伸缩。然后,把一根线伸到孔中,接着从另一侧拉出来。在线的末端打一个结,然后将它重新推回孔中。接着,将各个钳夹用螺栓和尼龙防松螺母固定在钳夹支架上。
13 DIYer签到处
想在你的机器人站起来之前先跟她拉拉小手吗?那就行动吧!
| 编译: | 湛湛蓝 |
|---|
果壳DIY站QQ群: 132647923 (加入时请报上你在果壳的个人主页地址,以防广告ID)
果壳DIY站微博: http://t.sina.com.cn/guokrdiy