

| DIYer: | PeckLauros |
|---|---|
| 制作时间: | 1天 |
| 制作难度: | ★★★☆☆ |
| GEEK指数: | ★★★☆☆ |
我买的这个头骨模型原本用来装饰我的书桌,但是我想在上面做些更为有趣的改造。
1 材料和工具
○ 一个塑料头骨模型
○ 8个长螺钉
○ 一个单片机(我用了块Arduino电路板)
○ 一块万能电路板
○ 一个WII双节棍手柄,要带插座的(我的插座是买的,但你也可以轻松地依据 教程 DIY一个)
○ 微型伺服电机(我用了两个舵机。一个给眼睛,一个给下颚用。)
● 电池(连接电脑的时候从USB供电,其他的时候就要靠电池。)
● 电钻,许多钻头,一根约20cm长的粗铁丝,强力胶,一些导线.



3 改造眼球
- 受Achmed的“死亡的恐怖”和Jeff Dunham的“口技”的启发,我打算让这家伙的眼睛横向移动,同时这也比较容易实现。

- 在眼球的侧面中心钻出一个穿透的洞。

- 眼球背后的塑料杆也要沿中心钻出个可以插入螺钉的洞。
4 改造头骨


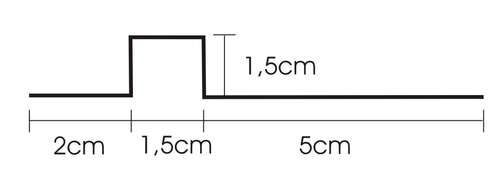
- 头骨上面眼眶的位置需要沿着垂直方向钻两个适合螺钉的洞然后插入螺钉,小心地在正中间开始钻,不然做好以后会显得有些斗鸡眼。



- 在眼眶位置背面开一个横向的洞,当球转动时,眼球背后的塑料杆会在这个洞里中左右移动。做好以后我用冰棍杆和插进眼球背后的螺钉暂时接起两个塑料杆做了转动眼球实验,效果不错。

- 接下来的工作就只需要放进伺服电机然后将它连接到眼球上来控制眼球的转动。

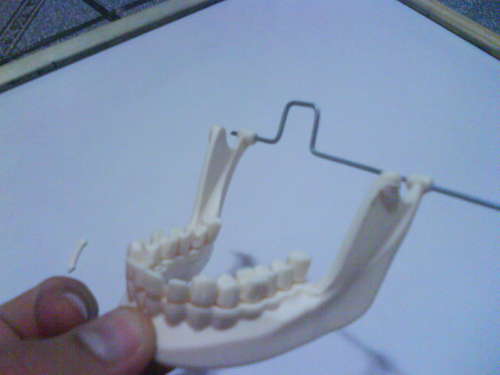



7 安装下颚的伺服电机

- 电机通过两个螺栓固定到头骨上。电机上连接着原先用来控制航模副翼的摇臂(我用来控制眼睛的电机也一样)。简单的用铁丝弯成个拉钩。在确定下颚允许运动的范围(嘴的开合位置)之后,用两滴强力胶将旋转轴固定到下颚上,然后将电机和旋转轴之间用做好的金属拉钩连上就行了。
8 安装眼球的伺服电机

- 为了控制眼球的转动,用一个塑料条连接到眼球背后插入的短螺杆,使两个眼球能够同时朝一个方向运动。塑料条像图中一样用粗铁丝连接到伺服电机的摇臂上。

- 检查机械部分的运作正常之后,量出伺服电机的允许运动范围,之后在软件算法里控制。
- 伺服电机工作的样子:
9 电机的控制
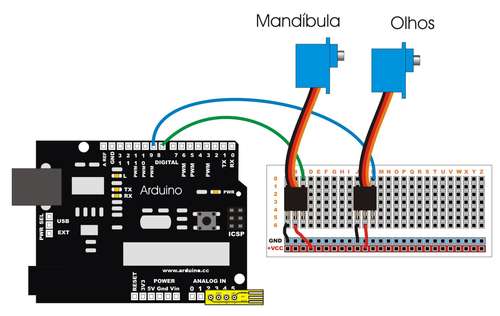
- 为了控制头骨的运动,我用双节棍手柄配合一个作为“大脑”的Arduino板进行操纵。
- 将手柄连接到Arduino电路板上时我用了个专用插座。
- 连接是非常简单的,电机通过万能电路板连接到引脚8和引脚9,电机的电源来自Arduino电路板,而电路板的供电来自USB线或者电池(没有通过USB线连上电脑时候)。

- 我把软件中的参数针对头骨中眼球和下颚的运动范围做了调整。
这些资料在制作时帮了我很多忙,特别是在将双节棍手柄和Arduino结合使用的经验上。
| 编辑: | Greeny |
|---|
果壳DIY站QQ群:132647923, 2群:179240860(加入时请报上你在果壳的个人主页地址,以防广告ID)
果壳DIY站微博: http://t.sina.com.cn/guokrdiy