
本项目介绍的是晒太阳的蚊子的第三个远房亲戚——太阳能卫星机器人,同样是采用太阳能脉动充放电控制电路,但是却是另外一种全新的运动方式——以陀螺旋转的方式移动,所以又称为太阳能陀螺机器人。

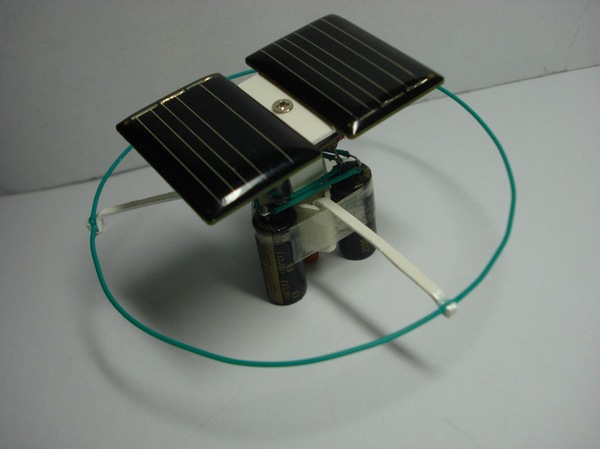
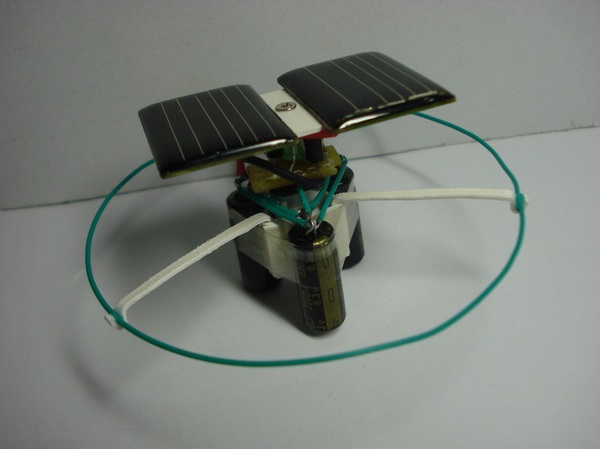
如果了解BEAM机器人的朋友,可能对这样造型的机器人已经很熟悉了——三脚支架中的两脚,加上连接电机的底部转盘,总共三点支撑地面,晒会太阳充会电,电机驱动转盘转动再带动机器人移动。
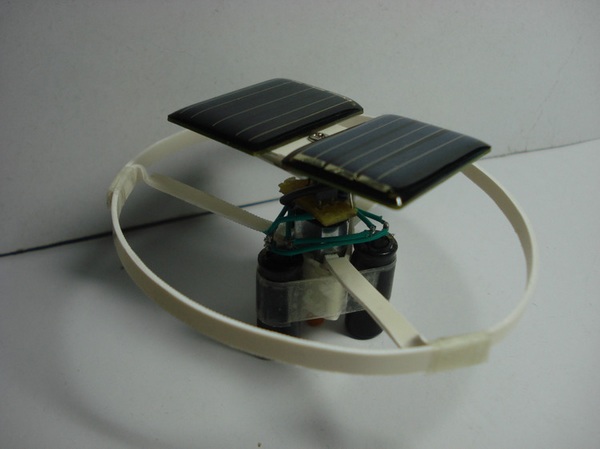
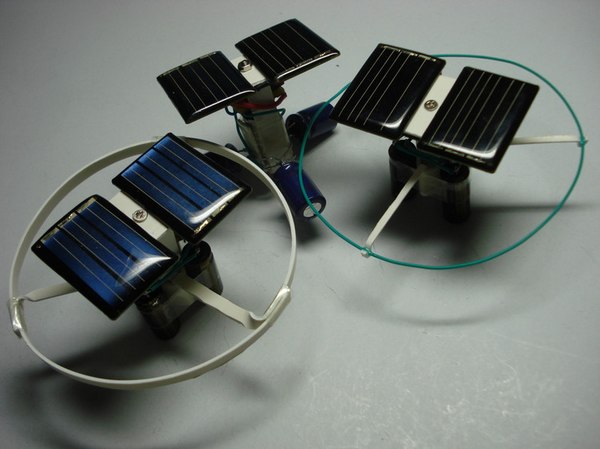
从以上插图我们可以看到两种不同的造型,不过原理都是基本一样的,只不过结构上有一点区别(有一个带了 碰撞环 ,这个后面会具体说明)。
以下为效果视频,前一段是在灯光(白炽灯)下进行测试的效果(包括带碰撞环的效果),后面一段为在阳光下的效果。
双向电梯
1 基本原理
本项目的机器人的外形像一个人造卫星,是以太阳能电池作为电源,电机驱动底部的转盘转动,从而带动整个机器人移动。由于是以自身转动的方式进行移动的,就像一个旋转的陀螺,所以本项目机器人又可称为“陀螺机器人”。
1.1 驱动原理
本项目的驱动原理也是比较简单的,主要是电机带动底部的转盘转动——机器人有一个三脚支架,同时只有相邻的某两脚支撑地面,再加上底部连接电机的转盘,“两脚+转盘”——三点支撑地面。电机带动转盘转动,则其中一点转动,另外两点支撑,机器人就可以整体移动。
1.2 机械结构
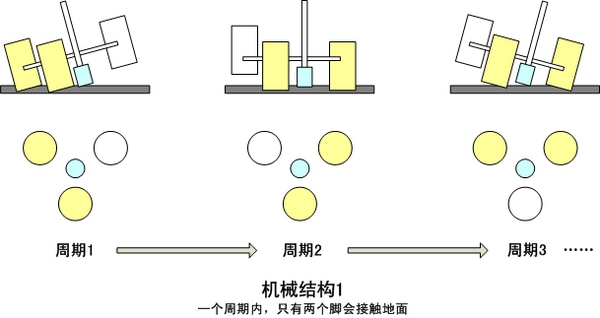
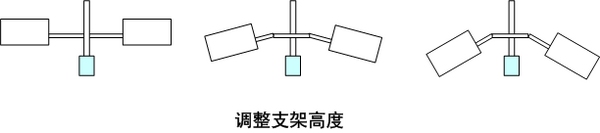
本项目机器人有一个三脚支脚,主要有三种情况的结构,稍微通过调整就可以有不同的运行效果。
- 1、如果是三脚支架离地比较高(相对于转盘),且底部用直径比较小的转盘,则三点平衡比较稳定,每完成一次充电周期后电机转动只能带动转盘转一点距离,一般只能是由一组相邻的双脚交换为下一组相邻的双脚支撑地面,每周期移动的距离比较小。
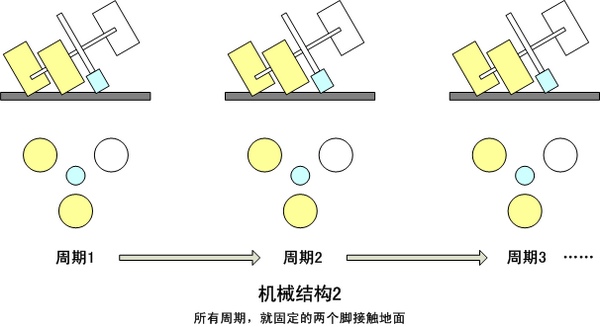
- 2、如果是三脚支架离地过高(相对于转盘),则三点平衡相当稳定,虽然能够带动机器人移动,但是因为支架过高导致无法交换支撑地面的双脚,就是说一直都是开始运动时默认支撑地面的双脚着地。
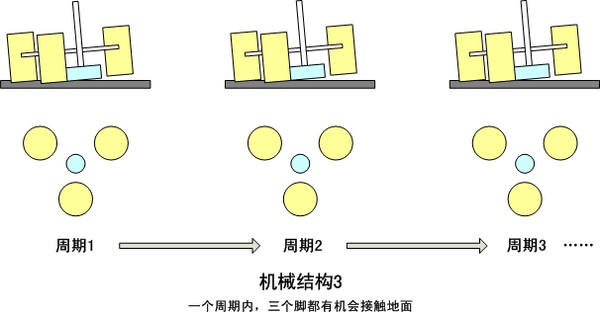
- 3、如果是三脚支架离地比较低(相对于转盘),以及底部用直径比较大的转盘,则三点平衡相对不够稳定,每个充电周期后的运行可以接近平滑移动,也就是说每周期移动的距离相对会大一点。
作为扩展的结构功能,本项目的机器人还可以增加一个“碰撞环”:用PVC剪成细条做一个环,再用三根细条支架固定在周围一圈。本机器人加了“碰撞环”后,如果在转动移动的过程中,碰到障碍物后会有一个反弹转向的效果,之后再继续转动移动(具体见: 版本升级 )。
1.3 电路原理
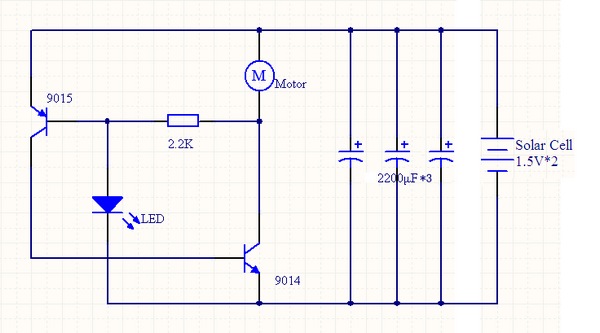
本项目机器人的控制电路和PVC-2号机器人项目基本是一样的——典型的脉动充放电电路。
但是两者还是有一点区别:PVC-2号项目的电解电容是一个4700uF,而本项目的电路采用的是三个2200uF的电解电容。
三个电解电容并联在一起,其容值就是三个电解电容之和,这样本项目采用的电解电容其实就是6600uF,比PVC-2号的4700uF大一点。对于本脉动充放电电路来说,电解电容的容量越大,储电量就会越大,但充电的时间也会越长,不过放电的时间也会越长,持续运动的时间也会越久。
当然,本项目之所以用三个电解电容并联在一起代替原来的一个电解电容,主要还是因为机械结构的需要,即用三脚支架作为平衡支撑的结构。
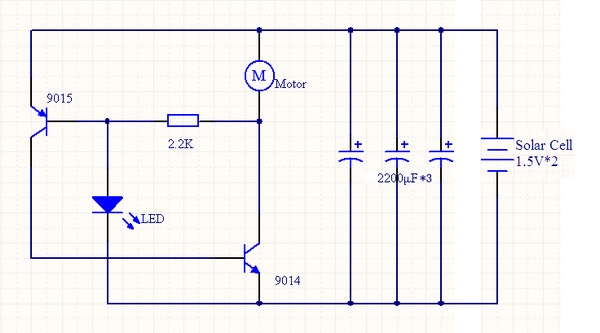
基本原理如下:
简单的说,即:太阳能电池对电解电容充电,当充电量达到由LED二极管设置的充电上限后,则电路开始瞬间放电提供给电机转动;虽然电机转动消耗电能使电压下降至低于LED二极管的下限,但是由于电路存在一个导通循环的机制,仍然会继续放电让电机转动,能够尽可能的把电解电容中存储的电能都消耗掉;消耗完电解电容中的电能后,重新由太阳能电池对其进行充电……如此循环往复。
也可以这样理解:太阳能电池对电解电容进行缓慢充电(太阳能电池的电流比较小),充电达到上限后对电机进行瞬间放电(电机的电流比较大);放电停止的下限比较低,可以比较彻底的把充电的电量消耗完。
在PVC-Robot 2号机器人的项目中已经对该电路原理进行了更详细的分析,这里不再重复。如果还有不清楚的,或者有兴趣继续了解的,可以点击晒太阳的蚊子· 太阳能动力机器人 。
2 准备工作
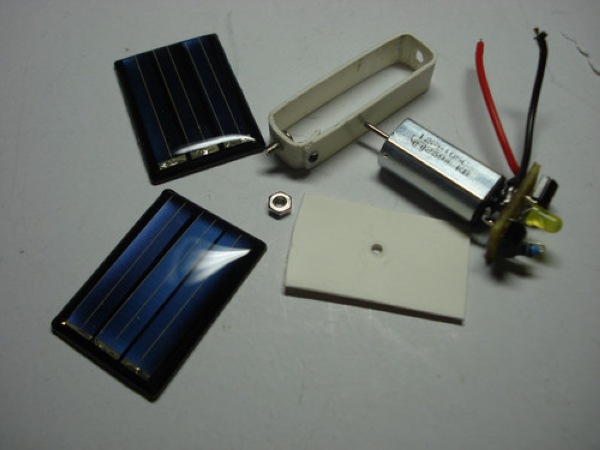
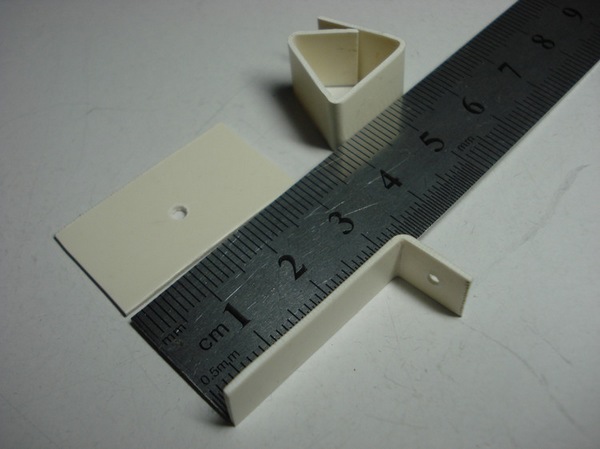
本项目需要的器材主要包括:PVC线槽、小型电机(马达)、太阳能电池、电阻、电解电容、二极管、三极管、螺丝/螺帽等。

以下列出本项目主要器材,其中的采购预算,由于有些器材采购时一般是批量的,而本项目中实际使用用不了那么多(剩下的可以留在以后的其他项目上),所以另外加了一项成本折算。
主要的器材都可以从网上购买,我列出了一些淘宝上的网址,基本上我也是通过这个渠道进行采购的,供大家参考。
| 名称 | 规格 | 数量 | 采购预算/成本折算 | 来源 | 用途 |
| PVC线槽 | 2.5CM宽度 | 1段 | 4元/0.5元 | 实体五金店 | 主要结构材料 |
| 小电机 | 微型马达 | 1个 | 3元 | 淘宝:morehave | 动力 |
| 太阳能电池 | 1.5V | 2片 | 2.2元 | 淘宝:zhiqiang588 | 电源 |
| 电阻 | 2.2K | 1个 | 8元/0.03元 | 淘宝:jxpjihao | 电子元件 |
| 电解电容 | 2200uf | 3个 | 0.6元 | 淘宝:东莞创博电子 | 电子元件 |
| 二极管 | LED发光二极管(红/黄/绿) | 1个 | 0.08元 | 淘宝:lc工作室 | 电子元件 |
| 三极管 | 9014、9015各1个 | 2个 | 4.5元/0.15元 | 淘宝:jxpjihao | 电子元件 |
| 电路板 | 电路板/实验板/万用板/洞洞板 | 1块 | 1.5元 | 淘宝:lm750811 | |
| 齿轮组 | 大小两个可选的底部转盘 | 1对 | 2元 | 淘宝:morehave | 底部转盘 |
| 胶管 | 自行车气门芯胶管 | 1条 | 0.2元/0.02元 | 实体五金店 | 小转盘“外胎” |
| M1.2*5螺丝 | 直径1.2mm,长5mm | 1颗 | 4元/0.04元 | 淘宝:精隆五金制品有限公司 | 固定PVC材料 |
| M2*6螺丝 | 直径2mm,长6mm,平头 | 1颗 | 2元/0.02元 | 淘宝:精隆五金制品有限公司 | 固定PVC材料 |
| M1.2螺母 | 孔径1.2mm | 1颗 | 15元/0.15元 | 淘宝:微型螺丝小王 | 固定PVC材料 |
| M2螺母 | 孔径2mm 合计 | 1颗 | 2元/0.02元 49.08元/10.31元 | 淘宝:精隆五金制品有限公司 | 固定PVC材料 |
3 制作过程
以下将按照制作的顺序,全程介绍本项目机器人的制作过程。
3.1 电路焊接
本项目机器人的控制电路和PVC-2号机器人项目是一样的,虽然一个是单个的大电解电容,一个是三只并联在一起的小电解电容,但是电路板还是一样的(电解电容可以外接)。
关于电路焊接的说明这不再重复,具体请参考PVC-2号机器人项目晒太阳的蚊子· 太阳能动力机器人 。
这是“电路板正面布局图”(无焊点的一面,黑芯蓝点为焊点,蓝色带代表焊点相连):
这是“电路板底面布局图”(有焊点的一面,黑芯蓝点为焊点,蓝色带代表焊点相连):
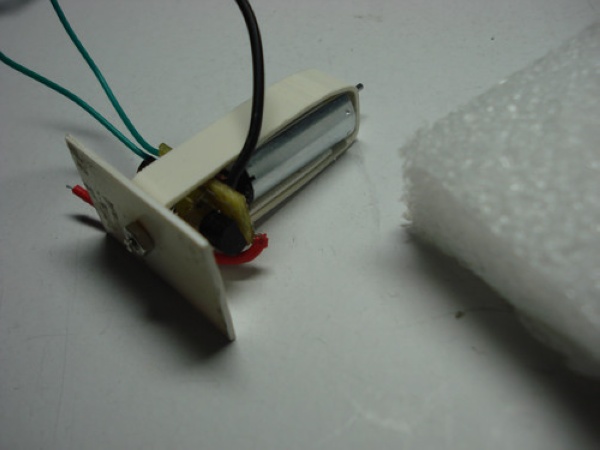
选读内容——搭焊:
作为尝试或者说作为进阶,也可以省去电路板,直接对电子元件的引脚进行搭焊。
因为要围绕电机直接搭焊,为了防止电机的金属外壳把电路给短路了,可以在外壳上包一圈透明胶布。

直接把电子元件直接焊在电机的电极上。
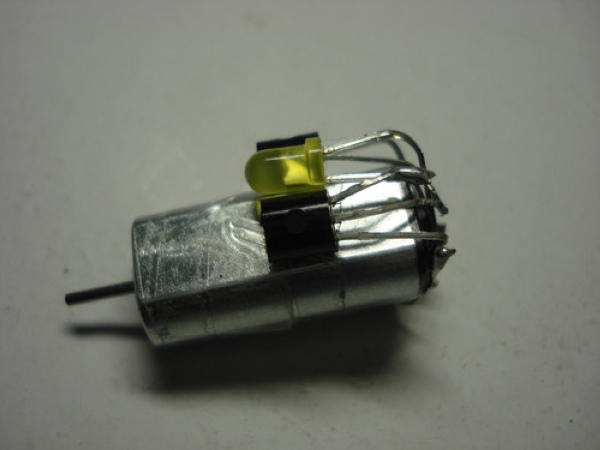
焊接好的电路。

搭焊电路的效果比较有粗放的艺术质感,而且不同的人可能焊接布局的方式不同,最终的效果也都不一样,作为DIY来说会比较有个性。但直接搭焊对于焊接的技巧要求比较高,尤其是稍微复杂一点的电路不好把握好。正因为如此,在我们PVC教程中只是把搭焊作为一个附属的“选修”内容。
3.2 三脚支架
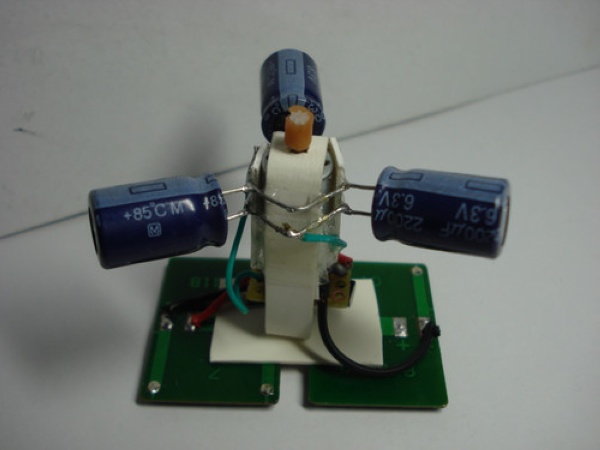
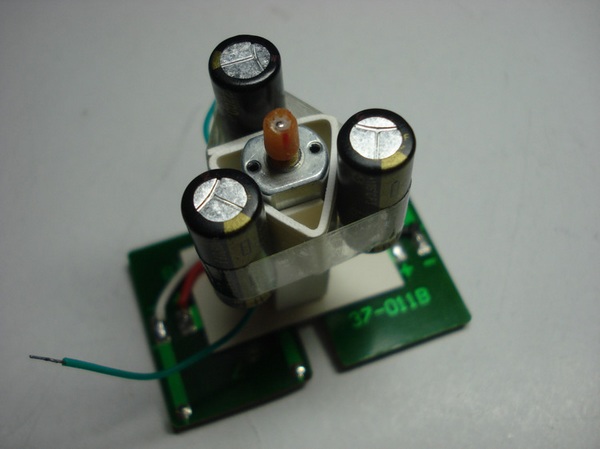
用三只电解电容做成三脚支架。
先把三只电解电容按下图布局排好。
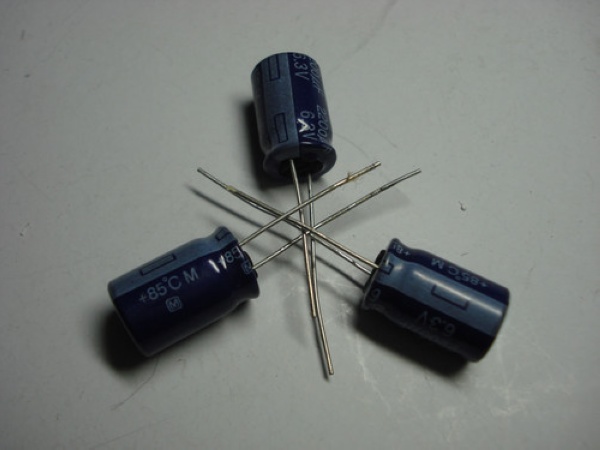
把电解电容的引脚折成如下图形状,把三只电解电容的电极分成两层连在一起,注意正极的与正极连一起,负极与负极的连在一起。

把三只电解电容的电极并联焊在一起。

3.3 电路板
电子电路是与前几个项目一样的太阳能脉动充放电控制电路,作为一个经典的电路基本上可以做成通用电路板,见下图,其中LED发光二级管这次选择黄色的。

可以直接把电机的电极与电路板焊接在一起。具体焊接点需要对照之前的电路图,而且让电机的位置正好位于电路板中央位置。
对应到以下电路板底面图中橙色圈所对应的焊点位置,把电机电极直接焊接在电路板上。
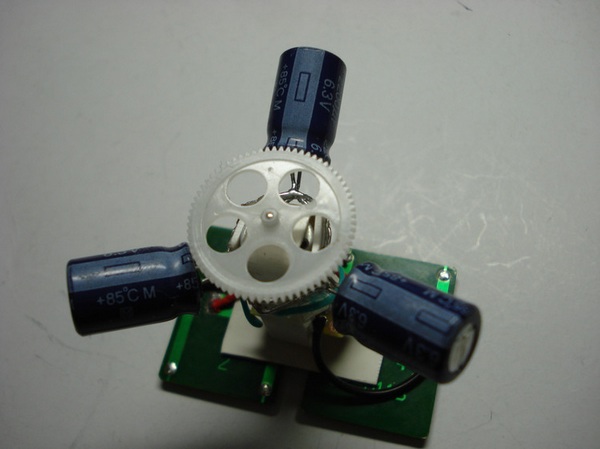
焊接好的电路板和电机。


3.5 整机组装
开始整机组装。
准备好所有的待组装器件:太阳能电池板、太阳能电池板的支架、电机支架、电机以及电路板。
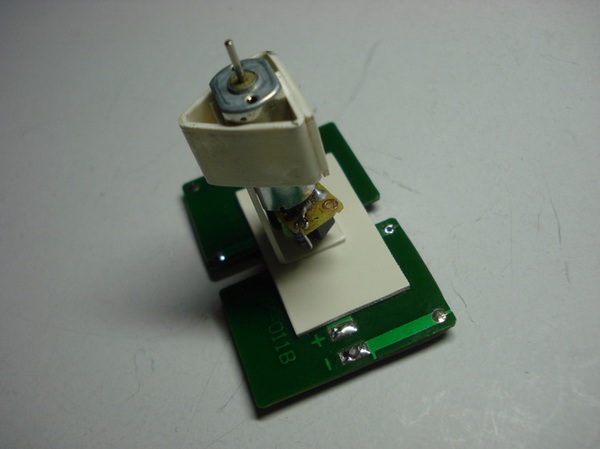
把电机、电机支架以及太阳能电池板用螺丝固定起来。
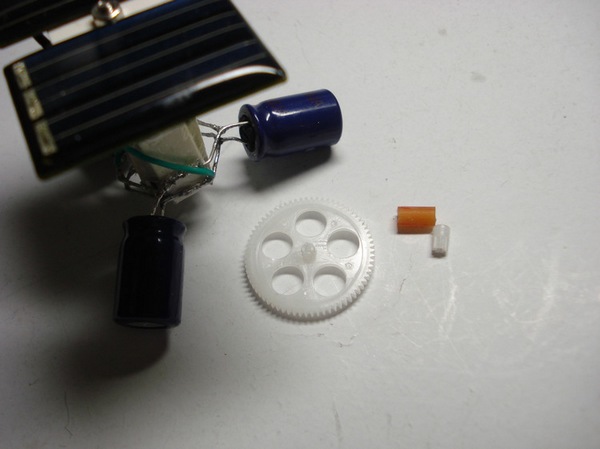
把太阳能电池板用双面胶布固定在支架上,按照电路原理图把电解电容以及太阳能电池板的电极用电线与电路板连接起来。同时把小齿轮安装到电机上,并且在小齿轮上套上一截自行车气门芯胶管(也可以省略)。
在电机支架外露的两边各插入一块PVC方片,同时把电解电容的三脚支架插到电机支架上,并用尖嘴钳调整三脚支架把电机支架正好夹住,并在两个方片的靠近太阳能电池板的一侧(没有固定三脚支架的一侧)用透明胶布包好,把方片固定在电机支架上。
用502胶水把三脚支架和电机支架粘贴在一起固定好来。

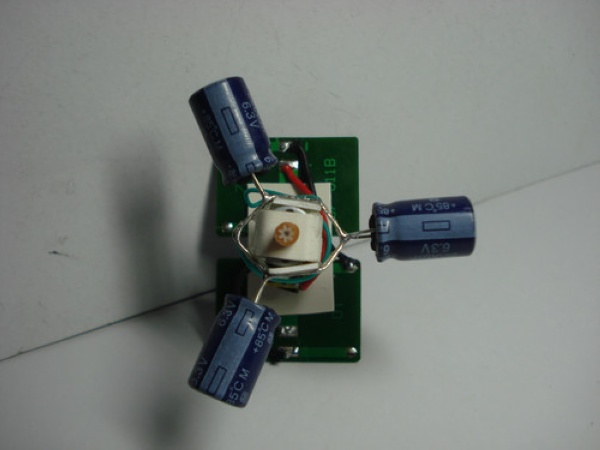
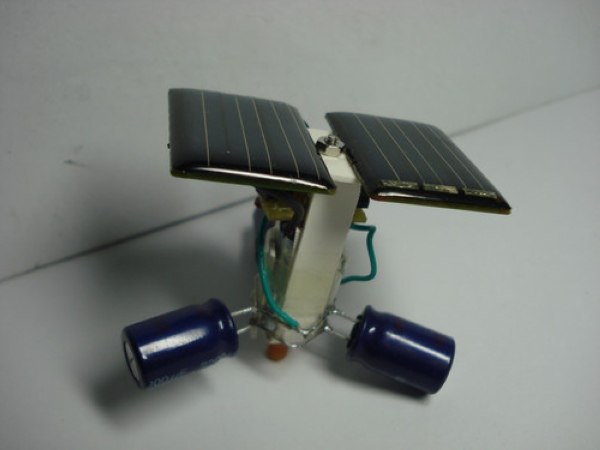
组装完毕的机器人。

3.6 整机调试
完成整机组装后,需要进行调试。
首先,测试电路是否正常工作,可以在100W白炽灯光下测试电路的充放电控制是否正常,电机是否能够正常转动(见视频中在灯光下的效果)。

然后,调试机械结构,主要还是调试三脚支架的高度/角度。前面机械原理的章节已经提到通过调整三脚支架的高度(相对转盘)对最终运行效果的影响。因为三脚支架已经粘贴在电机支架上,所以要调整三脚支架的高度,可以把三个电解电容的引脚往底部多折一点。



3.9 版本升级
作为升级版本,本项目的机器人可以增加一个“碰撞环”:用PVC剪成细条做一个环,再用三根细条支架固定在周围一圈。安装了“碰撞环”之后,如果在转动移动的过程中,碰到障碍物后会有一个反弹转向的效果,之后再继续转动移动。
以下为一个升级版本的光能陀螺,带“碰撞环”,并且结构部分重新作了设计,定名为“PVC-Robot 5号-Ⅱ型”。具体运行效果可以见上面视频中碰撞环的部分。

下面简略的介绍一下制作过程。
材料准备和第一个版本是类似的,电路板也是直接焊接在电机电极上的,不过三个电解电容可以选择形状上稍微细长的类型,且引脚不需要很长的那种。

用剪刀和尖嘴钳把PVC材料加工成如下图所示的尺寸和形状,下图从上到下分别是电机支架、太阳能电池板底板/支架。注意电机支架做成边长为15mm左右的等边三角形。
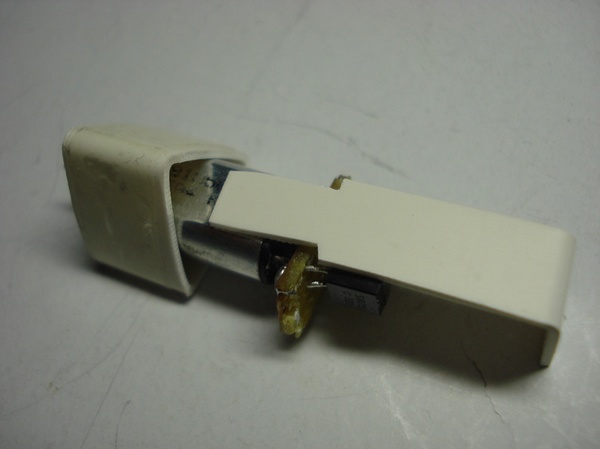
把电机支架夹住电机外壳,并且用透明胶布从支架外圈绑几圈固定好。

太阳能电池板支架的一端裁好,正好插入电机支架的三角空隙中。
用双面胶布把太阳能电池板粘贴在太阳能电池板底板上。

把太阳能电池板的底板和支架用M2*6的螺丝/螺母固定起来。
用透明胶布把三个电解电容如下图所示绑贴在电机支架周围做成支架,并且给电机装上小齿轮并在外面套一截自行车气门心胶管做成底部转盘(也可以只安装小齿轮不用气门芯胶管,运行效果会有不同)。注意电机轴突出要高过三个电解电容的底部,即让底部转盘要稍微高过三个电解电容做成的支架。
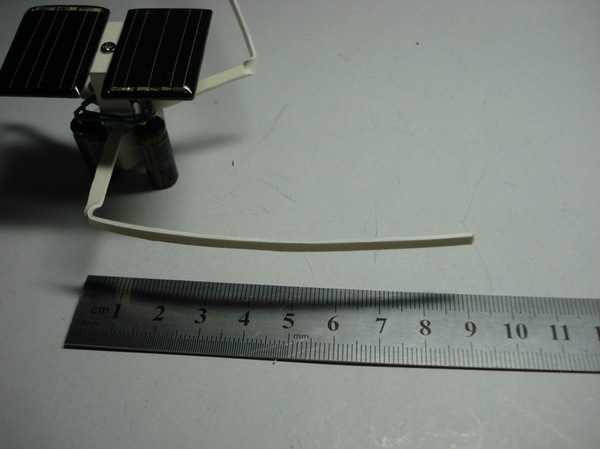
把PVC裁成细长条,其中一端折一个弯(用于直接插入三角形电机支架的三角空隙中),并且在30mm左右的长度再扭一个弯。
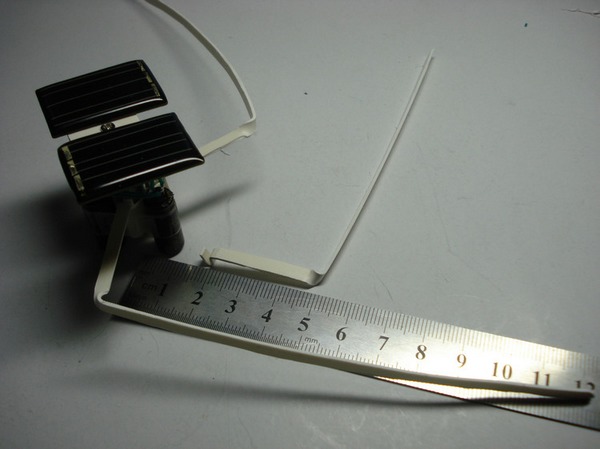
三根细长条都装到电机支架的三角空隙(在接合部滴入用502胶水),并且都扭了弯,然后如图所示保留大约90mm的长度。
三根长条如下图所示弯成互相连接的圆弧,接合部用透明胶布固定。

连接好电路的电线。
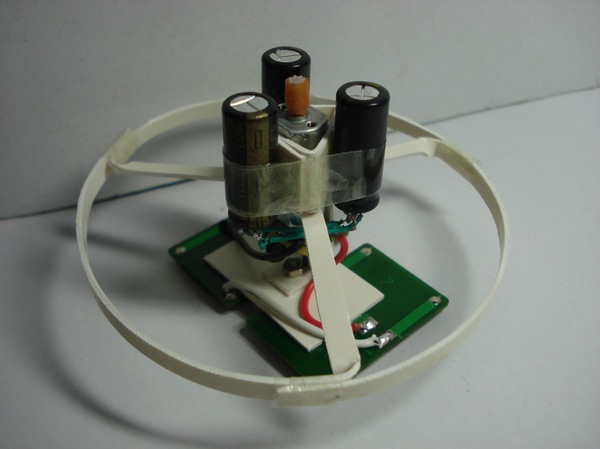
完成后的效果。

碰撞环也可以用细一点的金属丝来做,重量更轻、弹性更好,以下是用单芯铜芯胶皮电线做的碰撞环(也可以考虑用网线内芯的铜线)。为便于区分定名为“PVC-Robot 5号-Ⅲ型”。
用PVC做环的支架,把铜芯电线用502胶水粘贴在支架上。
光能陀螺家族(依次为Ⅱ型、原型、Ⅲ型)。
特别推荐:如果对于全金属版本的陀螺机器人感兴趣的,可以访问我朋友的博客:微型机器人系列- 太阳能陀螺
4 项目总结
本项目是一个以简单电子元件电路为控制基础的智能机器人。对于刚入门的朋友,可以通过这个项目:
本项目的机械结构也比较特殊,建议有条件的朋友可以试试手作为一次实践经历。
| 编辑: | Greeny |
|---|
果壳DIY站QQ群:132647923(加入时请报上你在果壳的个人主页地址,以防广告ID)
果壳DIY站微博: http://t.sina.com.cn/guokrdiy