
如果有天看到机器人像屁孩一样在地上学习打滚,你会有什么感觉? 众所周知,除非你有非凡天赋,否则在蹒跚学步之前你得吭哧吭哧先学会爬。这项原则同样也适用于机器人。
Josh Bongard是佛蒙特大学的机器人专家,他史无前例地创造了能够一边学习走路一边改变自己身体结构的模拟及实体机器人。他发现这些自我演变的机器人比那些已固定身体构造的机器人能更快速地学习,并发展出更健全的步法。

至今,工程师们还没有很成功地制造出一种可以在不规则环境中进行简单且自适应性操作的机器人。这就是为什么Bongard和他的同行们将注意力转向用计算机程序设计机器人和开发它们的行为,而不是尝试直接预先设定好机器人的行为。
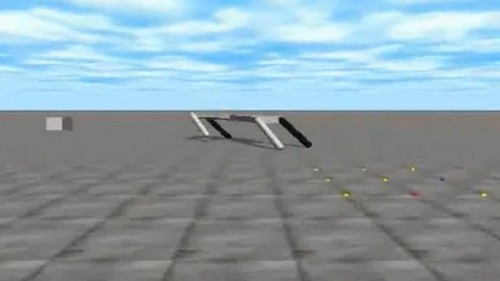
利用尖端计算机做出仿真特效,Bongard发动了一系列在三维立体空间中走动的合成机器人去运行一种叫遗传学演示的软件程序,它们以各种动作为实验直到发展成摇晃不稳的滑行、拖拉着脚走或者行走的步法——当然这取决于它们身体的规划,最终达到不翻倒但接近目的地。
这些机器人一共有12个运动部件,它们看起来像简化的哺乳动物的骷髅,由一根关节脊柱连接着四根枯骨,这四根枯骨也就是它们站起来的腿。
一些机器人开始平趴在地上,像有腿的蝌蚪或者蛇;另一些则张开着腿,有点像蜥蜴;还有一些像哺乳动物一样直立着腿在模拟物中跑来跑去。Bongard发现这代机器人能从不稳的滑行进展到张开腿,最后腿直立并运行得更好。这样能比从一开始就直立行走获得很好的行动力。
更聪明更灵活

Bongard实验中最惊人的发现还不是自我演变的机器人能以更速度接近目标,而是它们还能更好的处理之前从未遇到过的各种挑战,比如被推倒。
一直以来,有件事一直被忽略着,那就是自然界中一个明摆着的事实:动物的身体并不是停留在固定状态,大脑随着时间的推移越变越好。在自然进化当中动物的身体和大脑一直都是同步的。
Bongard说这项机器人技术尚未完成,是因为改变机器人身体构造要比改变机器人程序更具难度。
在现实世界当中试行

在UVW佛蒙特州的高级计算机中心,经过运行5000次模拟演练,花费30余个小时在每个机器人相对应的处理器上后,Bongard决定用实体机器人进行试验。
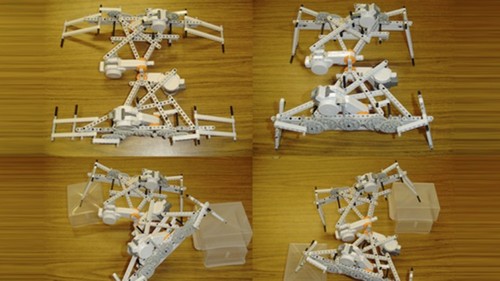
他用Lego Mindstorm kits公司生产的材料制造了相对简单的四腿机器人。实体机器人类似于那些用计算机模拟的机器人,但是有一根支架安装在机器人的前后腿上。作为调节器来搜寻成功的动作模式,这跟支架使腿渐渐地倾斜,从而使它们能纵横行走。

当支架让腿弯曲的时候,调节器会促使机器人走来走去,从而能让它的腿移动、脊柱弯曲。一开始像爬行动物趴在地上蠕动,然后渐渐地可以站起来,直到最后的这种动作模式——走起路来就跟草原狼似的。(这段有没有让你想起从猿变人的那幅图?)
Bongard在UVW的研究受到了美国国家科学基金的支持。他认为,虽然现在这项技术还是一个简单的雏形,但是他的机器人是进化论概念的一个有力验证。
来源: gizmag