
上一个项目是一个以太阳能为动力、以震动波的方式移动的机器人——晒太阳的蚊子,接下来连续的几个项目将介绍蚊子的几个远房亲戚——即采用同样的电子电路进行行为控制(内在是一样的),但是外形和移动的方式却是有较大不同的几个机器人。通过这些项目,我们可以了解更多DIY机器人的驱动方式,学习一些关于机械以及运动相关的知识。
首先我们介绍的是蚊子的第一个远房亲戚——太阳能滑行机器人,该机器人其实是一辆太阳能驱动的轮式小车,电子电路是和蚊子一模一样的,只不过原来的震动马达变成了驱动轮子转动前进的小电机(马达)。这个项目,我们的重点不再是控制电路,而是机械结构和驱动模式,“同样的电路,不同的运动方式” ——某种程度上说其实也算是一种思维的扩展。
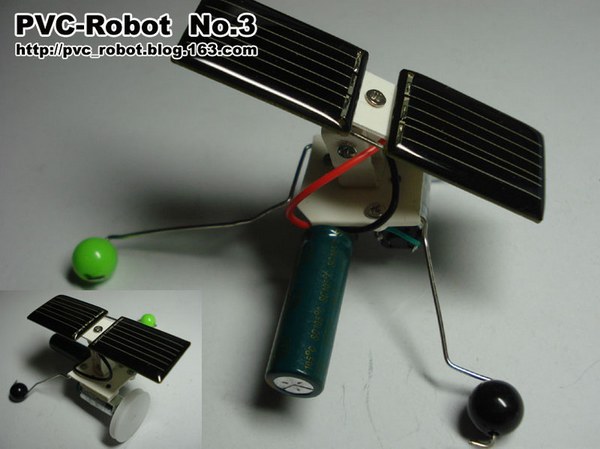
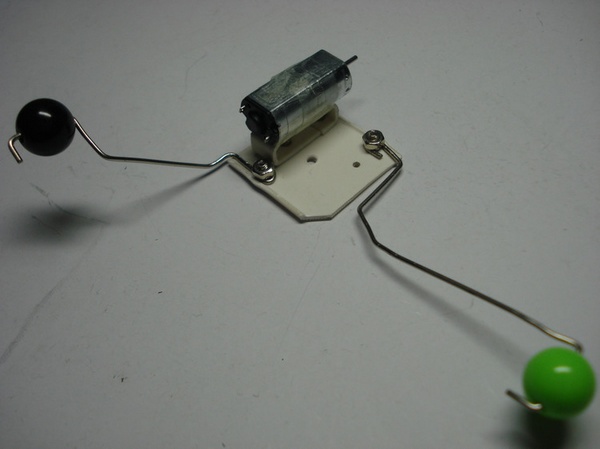
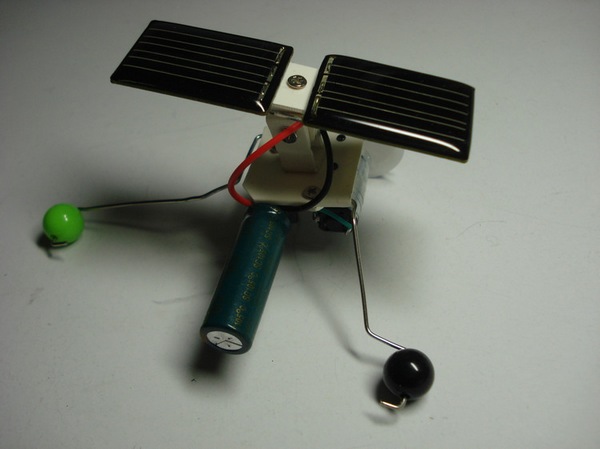
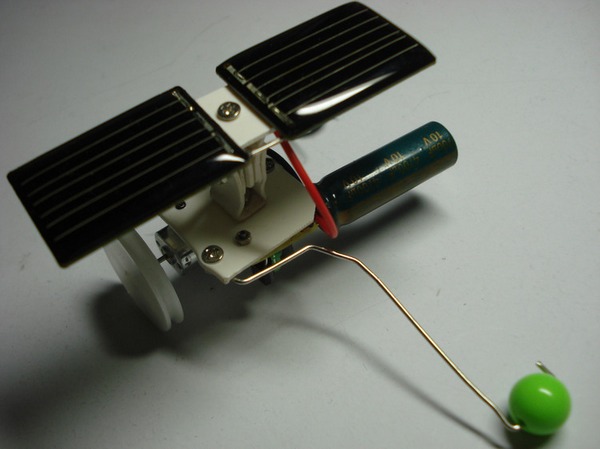
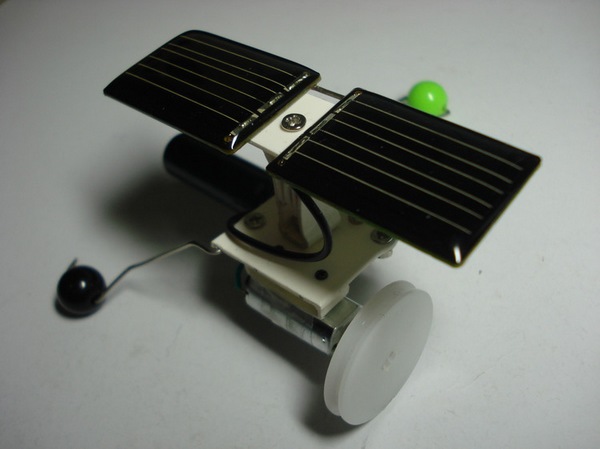
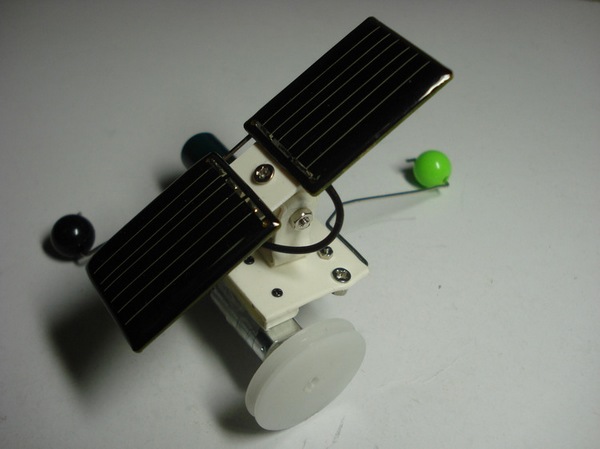
本项目机器人除了使用轮式驱动之外,结构上还有一个特点就是太阳能电池板设计成可以任意转动、可以指向任何方向,而在某些时候某些角度上看,本项目还有一点像一只横向滑行的蚊子(比如上图)——可以说这是和晒太阳的蚊子长得最象的亲戚了。
之所以称之为滑行机器人,是因为本项目机器人虽然和其他小车一样都是用轮子驱动的,但是因为其电源是太阳能,而且是采用和上一个项目一样的脉动充放电控制电路,所以实际行动起来不像一般的小车那样是连续行进的,而是停一阵、滑动一阵、再停一阵、再滑行一阵……。
以下为效果视频,前一段是在灯光(白炽灯)下进行测试的效果,后面一段为在阳光下的效果。
双向电梯
1 基本原理
本项目的机器人采用太阳能电池作为电源,依靠电机驱动轮子进行移动。
1.1 驱动原理
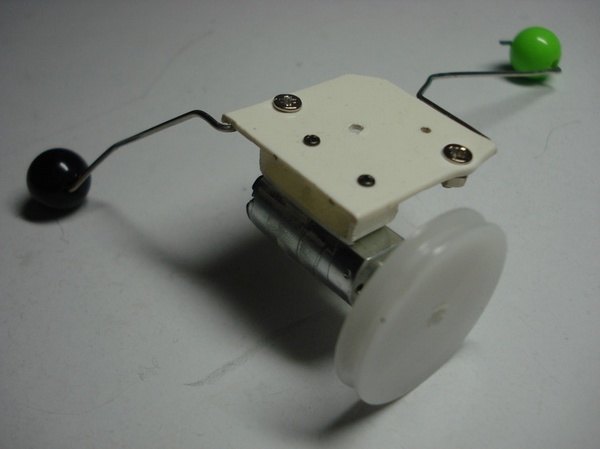
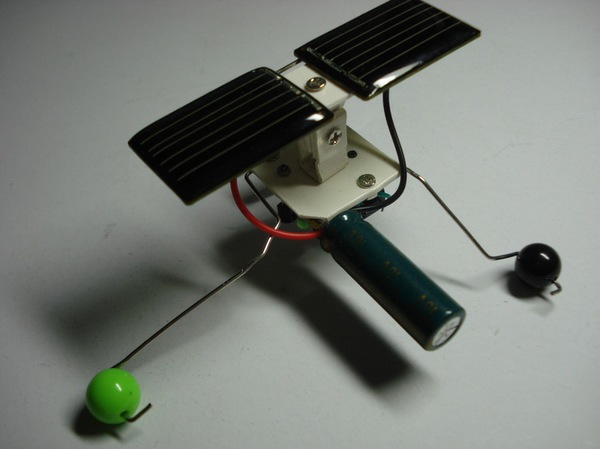
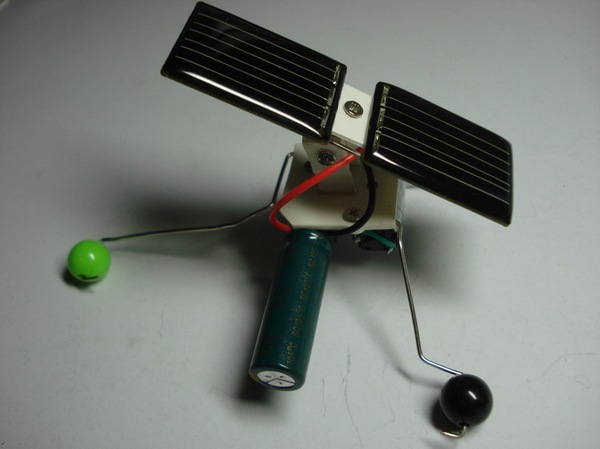
本项目机器人的采用特殊的单电机三轮传动结构:前面左边的轮子是主动轮,由一个电机直接驱动;前面右边的是从动轮,起到平衡作用;后面一个轮子也是从动轮,也起到平衡的作用。
这个结构区别于PVC-Robot 1号机器人的双电机三轮传动结构——双电机传动结构的两个前轮都是主动轮,可以通过改变两个前轮电机的转/停来控制机器人的行动方向(即实现转向);相对的,单电机传动结构的两个前轮中只有一个是主动轮,只能是控制机器人单向前进,而且如果要保持直线行走的话,还必须仔细调试好各轮子的安装位置和角度。
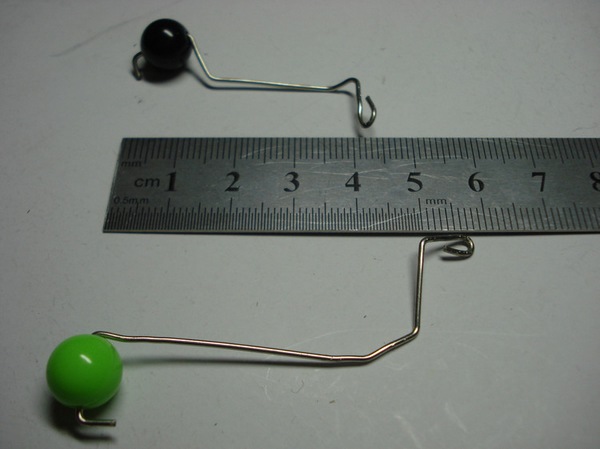
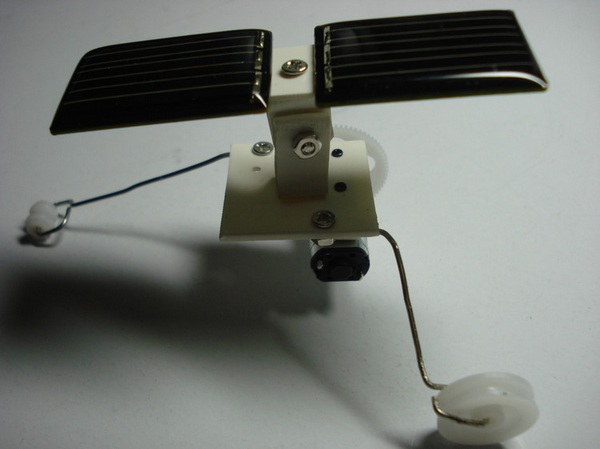
前轮只有一边是有动力的,需要调整好各轮子的安装角度,确保所有轮子的轴方向都是垂直于前进方向。尤其是前面右边的从动轮(下图最下面的轮子),如果稍微安装有点偏差的话,最后整体前进的时候可能就无法保持直线行走。
1.2 机械结构
本项目的单电机驱动的三轮结构,要求注意:
以上的三点在设计制作本项目的机械结构时要特别注意的,作为反面教材——本项目早期的版本就因为没有考虑以上的问题而被淘汰(具体见 下面 )
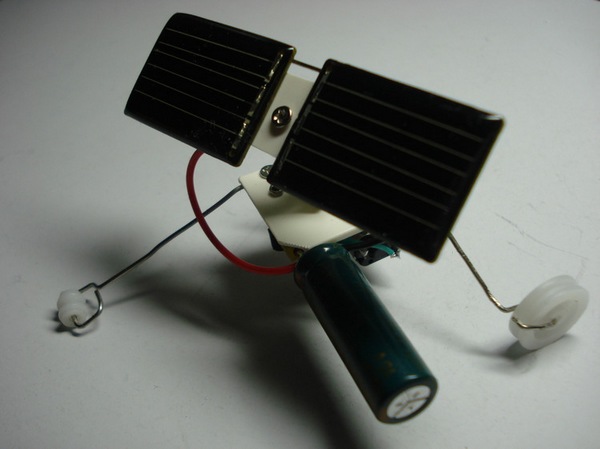
本项目机器人除了传动结构采用的是特殊的单电机结构,在太阳能电池板的支架采用了两组活动的支撑关节(凹凸件),确保太阳能电池板可以任意调整角度,则无论机器人向往哪个方向移动,其太阳能电池板都能转动调整(手工调整)到一直对准太阳的位置,以保障太阳能电池板提供相对稳定的电能。
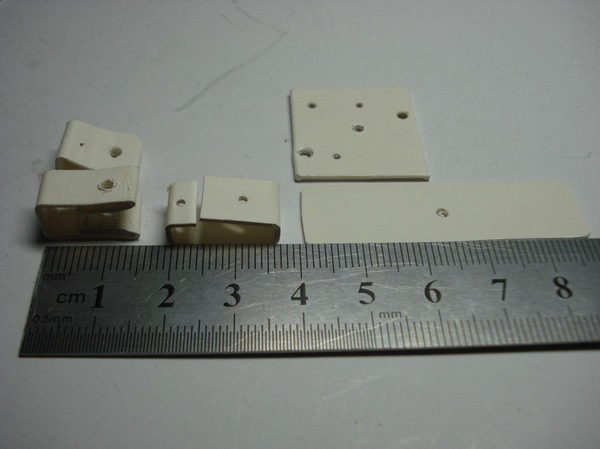
以下为多自由度凹凸关节件的结构图,所谓一个自由度可以理解为一个可活动的关节,下图中我们可以看到共有三组可以活动的关节,可以称为3自由度,但是实际上最下面和最下面的两个关节的效果都是水平旋转,在通常情况下都是一样的——实质上应该称为2自由度,即:水平面旋转自由度+垂直面旋转自由度。
不过,以上结构在本项目中,最上面的一个水平关节是连接太阳能电池板的,这个关节实际上可以调整太阳能电池板正面水平角度,与底座的水平关节的效果还是不同,相当于下面两个关节是手臂的水平和垂直关节,而最上面这个关节是手腕的关节,所以还是可以称为一个3自由度结构。当然,调整太阳能电池正面水平的角度可以对于项目本身来说没有太大的意义(与对准太阳光关系不大),但在这里还是侧重在作为一种机械结构进行了解。
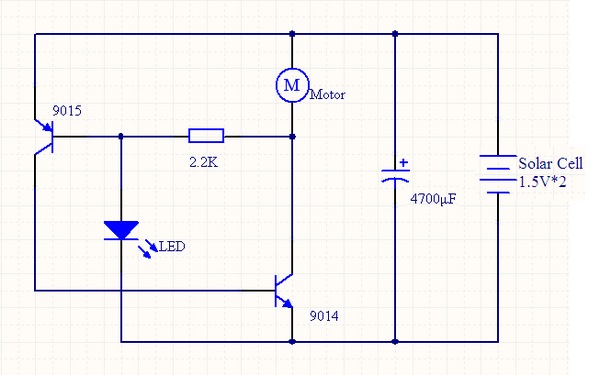
1.3 电路原理
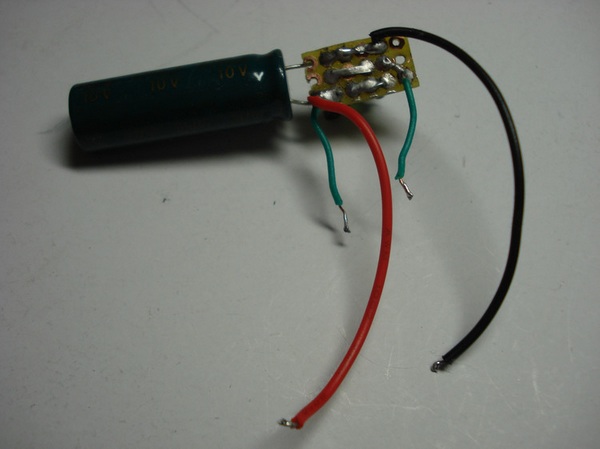
本项目的电路与上一个项目的电路是一摸一样的,电路原理也是一摸一样的——典型的脉动充放电控制电路。
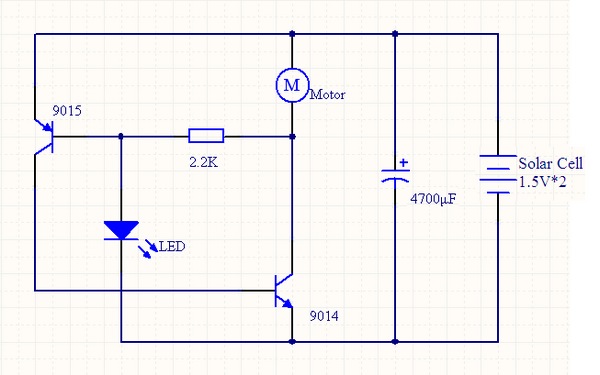
基本原理如下:
简单的说,即:太阳能电池对电解电容充电,当充电量达到由LED二极管设置的充电上限后,则电路开始瞬间放电提供给电机转动;虽然电机转动消耗电能使电压下降至低于LED二极管的下限,但是由于电路存在一个导通循环的机制,仍然会继续放电让电机转动,能够尽可能的把电解电容中存储的电能都消耗掉;消耗完电解电容中的电能后,重新由太阳能电池对其进行充电……如此循环往复。
也可以这样理解:太阳能电池对电解电容进行缓慢充电(太阳能电池的电流比较小),充电达到上限后对电机进行瞬间放电(电机的电流比较大);放电停止的下限比较低,可以比较彻底的把充电的电量消耗完。
在上一个项目中已经对该电路原理进行了更详细的分析,这里不再重复。如果还有不清楚的,或者有兴趣继续了解的,可以点击 这里 。
2 准备工作
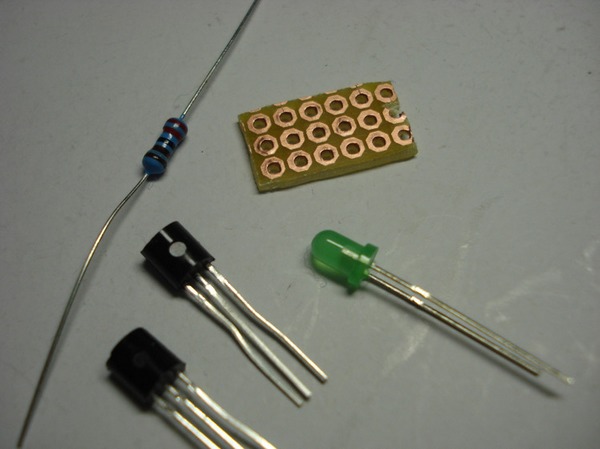
本项目需要的器材主要包括:PVC线槽、小型电机(马达)、太阳能电池、电阻、电解电容、二极管、三极管、螺丝/螺帽等。

以下列出本项目主要器材,其中的采购预算,由于有些器材采购时一般是批量的,而本项目中实际使用用不了那么多(剩下的可以留在以后的其他项目上),所以另外加了一项成本折算。
主要的器材都可以从网上购买,我列出了一些淘宝上的网址,基本上我也是通过这个渠道进行采购的,供大家参考。
| 名称 | 规格 | 数量 | 采购预算/成本折算 | 来源 | 用途 |
| PVC线槽 | 2.5CM宽度 | 1段 | 4元 / 0.5元 | 实体五金店 | 主要结构材料 |
| 小电机 | 微型马达 | 1个 | 3元 | 淘宝:morehave | 动力 |
| 太阳能电池 | 1.5V | 2片 | 2.2元 | 淘宝:zhiqiang588 | 电源 |
| 电阻 | 2.2K | 1个 | 8元 / 0.03元 | 淘宝:jxpjihao | 电子元件 |
| 电解电容 | 4700uf | 1个 | 0.4元 | 淘宝:东莞创博电子 | 电子元件 |
| 二极管 | LED发光二极管(红/黄/绿) | 1个 | 0.08元 | 淘宝:lc工作室 | 电子元件 |
| 三极管 | 9014、9015各1个 | 2个 | 4.5元 / 0.15元 | 淘宝:jxpjihao | 电子元件 |
| 电路板 | 电路板/实验板/万用板/洞洞板 | 1块 | 1.5元 | 淘宝:lm750811 | |
| 滑轮 | 皮带滑轮,直径24mm | 1个 | 0.5元 | 淘宝:morehave | 主动轮 |
| 小齿轮 | 内径0.95mm(电机轴径1mm) | 1个 | 0.5元 | 淘宝:morehave | 主动轮卡箍 |
| 圆珠子 | 2个 | 0.3元 | 淘宝:morehave | 从动轮 | |
| 曲别针 | 标准钢丝文具别针 | 2个 | 1元 / 0.02元 | 实体文具店 | 轮子支架 |
| 垫片 | M2 | 1个 | 3元 / 0.03元 | 淘宝:精隆五金制品有限公司 | |
| M1.2*5螺丝 | 1.2mm直径,长5mm | 3颗 | 4元 / 0.12元 | 淘宝:精隆五金制品有限公司 | 固定PVC材料 |
| M2*6螺丝 | 2mm直径,长6mm,平头 | 4颗 | 2元 / 0.08元 | 淘宝:精隆五金制品有限公司 | 固定PVC材料 |
| M2*10螺丝 | 2mm直径,长10mm,平头 | 1颗 | 2元 / 0.02元 | 淘宝:精隆五金制品有限公司 | 固定PVC材料 |
| M1.2螺母 | 1.2mm内径 | 3个 | 15元 / 0.45元 | 淘宝:微型螺丝小王 | 固定PVC材料 |
| M2螺母 | 2mm内径 | 5颗 | 2元 / 0.1元 | 淘宝:精隆五金制品有限公司 | 固定PVC材料 |
| 合计 | 53.98元 / 9.98元 |
3 制作过程
以下将按照制作的顺序,全程介绍本项目机器人的制作过程。
3.1 电路焊接
本项目机器人的控制电路和上一个项目是一样的,关于电路焊接的说明这不再重复,具体请参考上一项目( 点击这里 )。
这是“电路板正面布局图”(无焊点的一面,黑芯蓝点为焊点,蓝色带代表焊点相连):
这是“电路板底面布局图”(有焊点的一面,黑芯蓝点为焊点,蓝色带代表焊点相连):
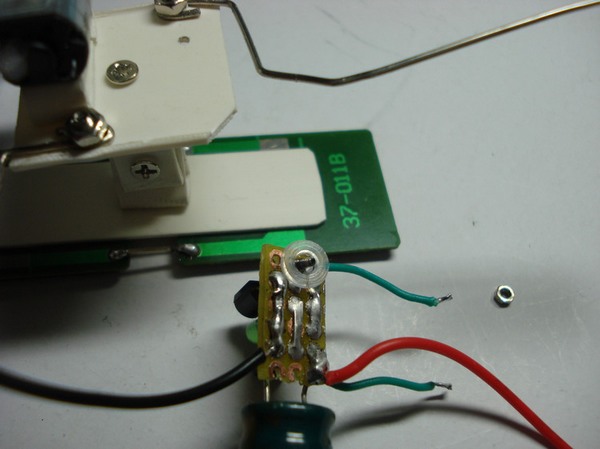
待焊接的电子元件。
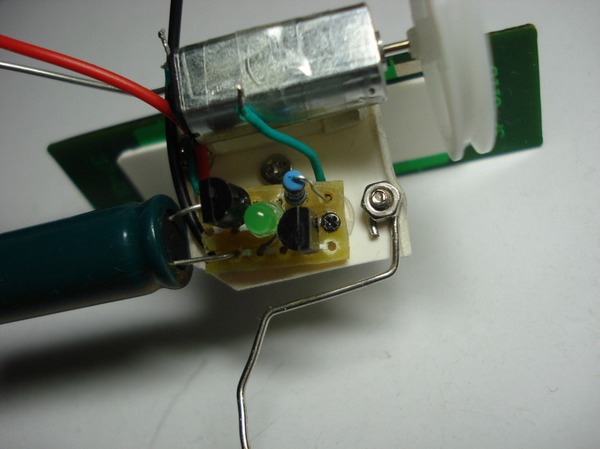
最终焊接好的电路。


3.3 主动轮
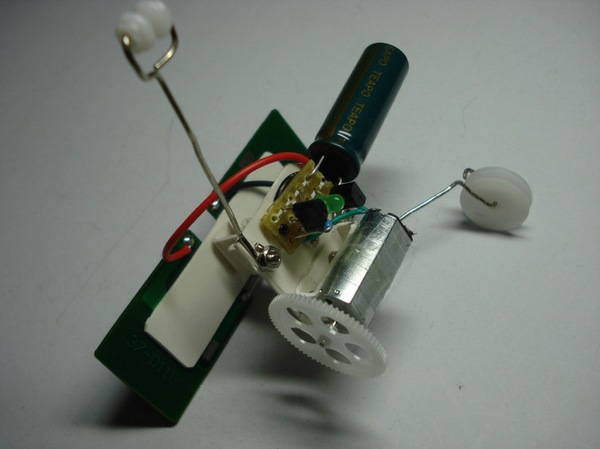
由于小电机的轴直径比较小(仅为1mm),而作为主动轮的滑轮轴孔比较大(2mm),为了把滑轮安装到电机轴上,则需要借助一个轴直径和电机一样的(1mm)小齿轮——把滑轮的内径用锥子再扩大一点,把小齿轮插入滑轮的轴孔中。
即:电机轴连接小齿轮,小齿轮再连接滑轮。





3.6 太阳能电池
安装太阳能电池板,主要是要安装好几个凹凸件的关节。
用双面胶把太阳能电池固定在底板上。

把凹凸关节件两部分用2*10mm的螺丝螺母连接在一起,再用2*6mm的螺丝螺母把凹凸关节件的“凸部分”固定到太阳能电池底板上。

把凹凸关节件的“凹部分”用2*6mm的螺丝螺母固定到小车底盘。

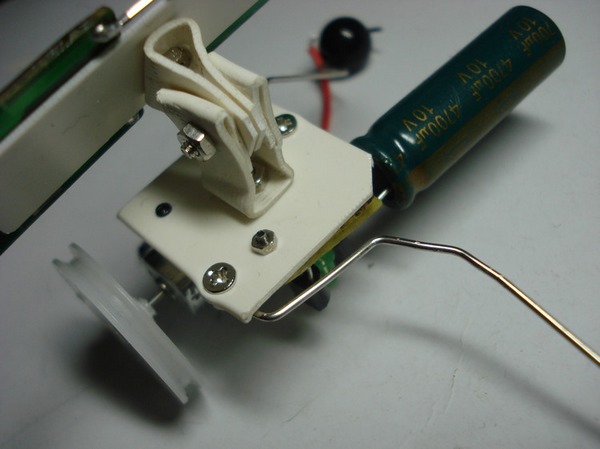
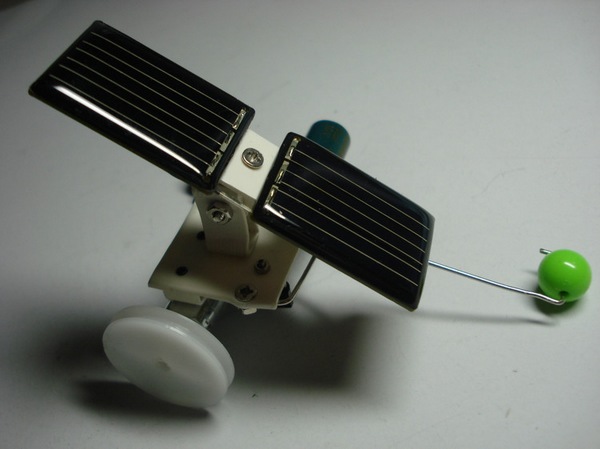
安装好太阳能电池的小车。

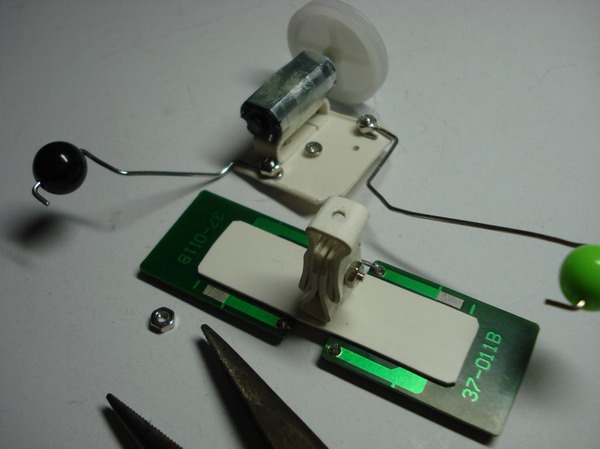
3.7 安装电路
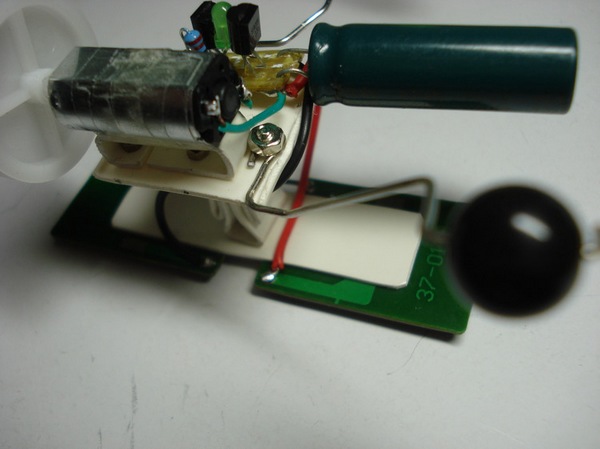
把电路安装起来。
电路板用1.2*5mm的螺丝和螺母,加上一个块2mm的塑料垫片,固定到小车底盘上。
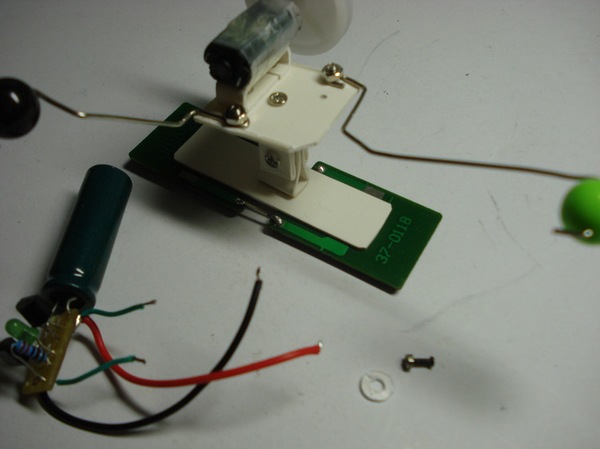
把电路板上的电线与电机的电极连接起来,同时把太阳能电池的电线也接好。由于是太阳能驱动,所以本项目机器人的就可以不用再安装电源开关了。
3.8 整机调试
要想小车能够滑行得比较远,要求从动轮的支架在作为轴承的部分要保留足够的空间,不要把轮子夹得太紧,即从动轮转动时摩擦尽可能的小。
要想小车滑行时能够保持直线运动,则需要通过调整从动轮的支架使从动轮处于最佳位置,三个轮子的方向都与前进方向平行。
这里不得不提一下 ,本项目的最初版本,是:采用大齿轮作为主动轮,采用小滑轮作为从动轮。
最终经过测试,不得不淘汰该设计,主要原因有
最终改变为现在的方案
淘汰的设计
4 项目总结
本项目是一个以简单电子元件电路为控制基础的智能机器人。对于刚入门的朋友,可以通过这个项目:
虽然本项目的机械结构比较特殊且在实际中应用得并不多,但作为一次思维的发散扩展训练,本项目也不失为一个不错的能够积累实践经验的实例。
| 编辑: | Rainy |
|---|
果壳DIY站QQ群:132647923
果壳DIY站微博: http://t.sina.com.cn/guokrdiy