
| DIYer: | AlphaFire |
|---|---|
| 制作时间: | 1周-3个月,视投入时间而定 |
| 制作难度: | ★★★★☆ |
| GEEK指数: | ★★★★★ |
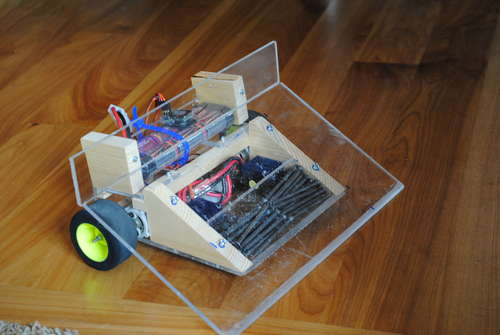
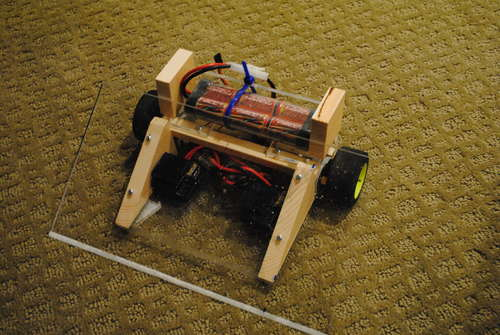
这个看起来不怎么像我们印象里日本相扑运动员的相扑机器人是一群来自明尼苏达州罗契斯特的Century高中的高中生们参加2011年三月份的Science Olympiad的州赛的参赛作品。虽然在32个队伍里面只拿到了25名,不过这位DIYer还是要向大家展示一下,DIY的过程虽然辛苦,但是也是乐趣无穷的。
以下是对Science Olympiad大赛的一些简介:
Science Olympiad大赛是一个基于团队合作的科学性质大赛,参赛的项目有“研究项”、“实验项”和“制作项”等等。相扑机器人参加的就是“制作项”的比赛。听起来很玄乎的相扑机器人比赛实际上是两个机器人要在大赛中展现将对方推出相扑环的真功夫。
接下来AlphaFire同学要带着他们的相扑机器人去参加北威州的比赛了。
双向电梯
1 不那么简的简介
- 有关Science Olympiad和相扑机器人比赛的一些拓展阅读:
- Science Olympiad,如前所述,是一个基于团队合作的科学性质的比赛,主办单位会邀请一些专家来主持比赛。按照 ScienceOlympiad的官网 介绍的,这个比赛已经有27年的历史了,而且“带动了科教的改革”。会根据学历或者年龄段分组,比如高中生参加的是高中分组的比赛。参赛的高中生们组成一个个的团队,一个团队有15名成员,各个成员也可以参与其他项目的比赛。比赛项目五花八门,有“实验项”比如说化学实验或者法医取证;“研究项”比如鸟类学论文和化石研究以及“制作项”比如” Mission Possible”或者相扑机器人这种。
- 看起来也不是很复杂的对吧。
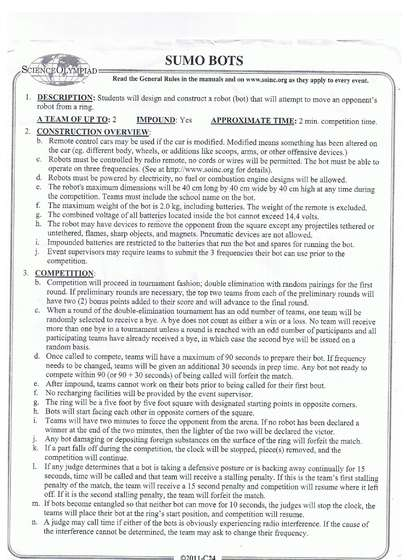
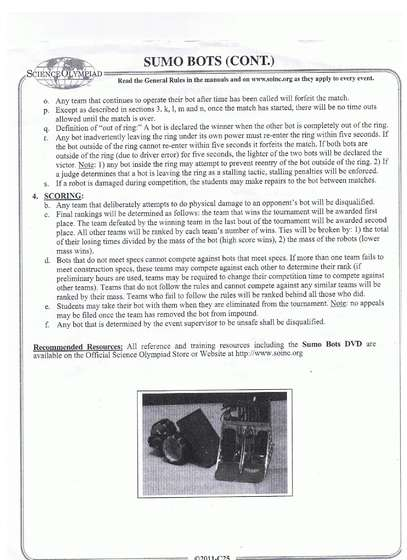
- 相扑机器人这个环节的比赛,主要就是要求参赛两方各自制作一个机器人,这两个伙计在比赛中要奋力把对方从相扑环里推出去,自己还得留在相扑环里,万一不小心自己也跑出去了,能在5秒之内跑回来也行。比赛过程中不能故意让机器人停止15秒以上,眼睛雪亮的专家们可都在看着你呢。
2 制作灵感
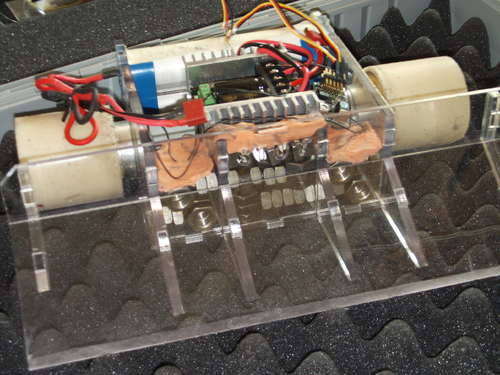
- 作为16岁的高中生,连去上科班的年纪都没到,制作灵感是来自于Science Olympiad官网的百科。这位AlphaFire同学从论坛来到了 一位Geek的根据地 这位Geek老兄从前做过一个名叫Harpy I的相扑机器人,有详细的教程,AlphaFire的灵感大部分就来自这里。在一些专业人士和业余爱好人士的指导下,AlphaFire同学顺利的完成了这个看起来有一点点天然呆的相扑机器人。
3 材料
- 原定计划是$100,不过遗憾的是,$100未能搞定,这些同学们在各自父母的支持下,用了大概$200。(编注:有万能的淘宝,我天朝各位擅长省钱的Geek们,相信你们肯定花不了这么多钱,比如说我肯定会抢我表弟的四驱车和我表哥的遥控飞机然后全部拆掉,哈哈。)
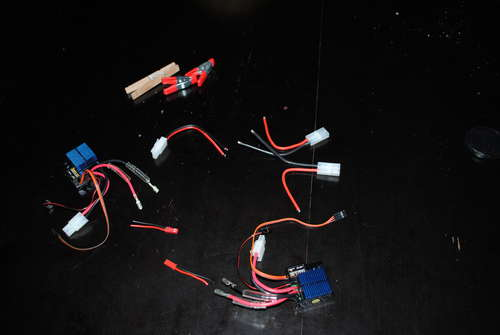
3.1 电子元件


○ 1个 GWS 4-通道遥控发射/接收器
○ 2个 Tazer 15T前/后向电子变速器

○ 2个 GWS EPS-350C(遥控模型飞机的马达)
○ 2个 模型飞机马达的导线(从旧的模型飞机电池上拆下来的)

○ 1个 京商(Kyosho)#14接线(电池延长线,带接线插口的)
○ 1个 田宫(Tamiya)#14接线(一组是两根)(要焊接,不熟练的同学请多备导线)(这两个都是知名模型厂商)

○ 1个 两个泡沫轮胎
○ 1个 7.2 V NiMH 遥控飞机用电池(各位同学没有遥控飞机难不成还去买一个,自己随意吧,直流电池能用的就行啦)
○ 4个 AA电池

3.2 结构材料

○ 松木板
○ 束线带(就是用来把导线扎在一起的)

○ 1/4英寸厚度的有机玻璃
○ 小号木螺丝
○ 螺丝数个(或者其他的重物,这是用来配重的)

○ 定位螺母

○ 捆绑接头(就是那种固定马达用的)
4 注意事项
- AlphaFire同学用的是GWS模型飞机马达,不过初赛的时候这个马达却让他连输了两场。第一场是因为这个马达的转矩太小,根本拗不过对手。第二场是因为马达转速太大,导致定位左边轮子的定位螺母松掉,于是左轮脱落,只能靠右边的轮子移动。如果你不想自己和齿轮打交道的话,你可以买一个模型飞机变速箱试试(所以还是专业一点的玩具车马达比较好吧)。不过论坛的有经验筒子们推荐电螺丝刀的马达,这个比较好用。
- (相扑机器人我觉得完全可用四驱车来改装的嘛,加一个斜坡铲就行了,不过这肯定不符合参赛规定,而且这么简单也就不好玩啦)
5 焊接
- 这一步是焊接用于连接马达和电子变速器的接线。
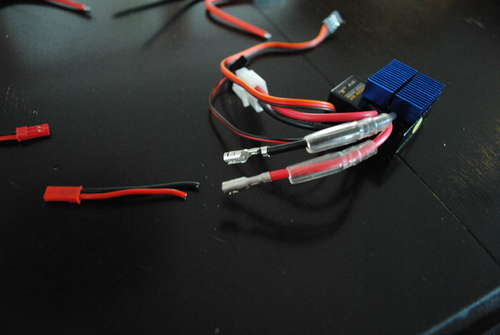
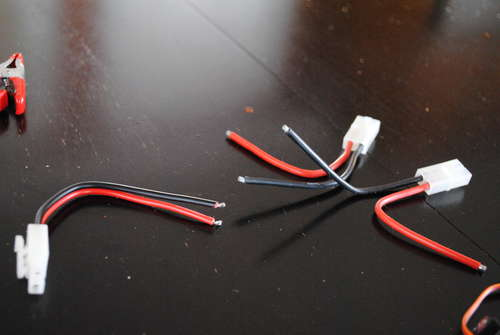
- 用剥皮钳把导线的皮剥掉。

- 色和红色的接在一起,黑色的和黑色的接在一起。
- 把导线剥出来的金属部分拧在一起。
- 把接触部分焊起来。

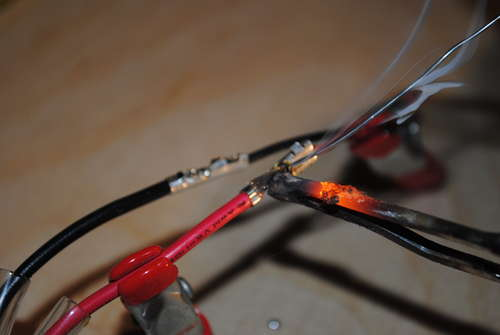
- 相信各位资深DIYer都很轻车熟路了,不过对于不熟练的同学还请小心谨慎,焊枪可是不长眼的 (编注:焊线的话电烙铁更常用些),所以可以在焊的时候像AlphaFire同学一样用夹子夹住固定。
- 然后把塑料皮再盖回去,不过如果剥皮的时候剥多了,可以用绝缘胶带分别的把两根导线焊接的部位缠住,不然可是会短路的。(我大三的时候上电工课可是亲身经历过的,一个姑娘她没有把导线用绝缘胶裹上,而且她还通着交流电,然后让我帮她焊。我刚拿把电路板拿起来,只听砰的一声,我的右手靠近烙铁的地方被均匀的覆盖了焊锡……那老师紧张得直接让我通过了不要做实验了>

- 为了保证电压一样,两个变速器是并联供电的,加在两个变速器两端的电压都是7.2V。具体操作步骤:
- 把#14号导线的末端的塑料皮都剥掉。
- 三根红色导线的末端都拧在一起。
- 把这三根导线焊在一起(三根的还请焊牢固一点)。
- 黑色导线也一样操作。
- (像我这种看到一个点接出三根导线就晕的人,肯定会不遗余力多买几根线,以保证我不会因为晕电路而半途而废)。

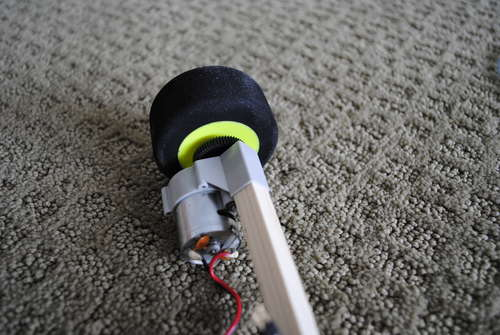
6 轮子

- 图中所示是装反了的,同学们不要这么装。


- 把模型飞机马达轴上的帽子直接扯下来。

- 把电机轴上的螺母和垫圈下下来。
- 然后把一个定位螺母旋到电机轴的末端。

- 把车轮上到电机轴上去,毂盖一侧朝里(朝着马达的),图中所示是装反了的。

- 这么装是不对滴,轮子要反过来。
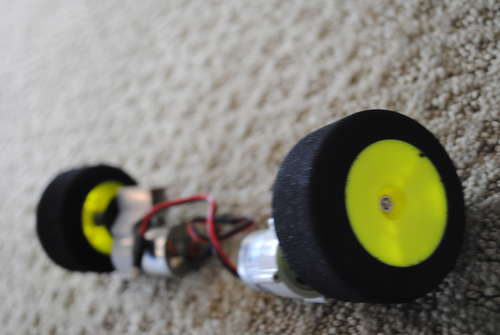
- 这么装也是不对滴。

- 这么装才是正道

- 轮子两侧都是有定位螺母的,把两个定位螺母拧紧,这样轮子就定位好了。可以开动马达,用手或者扳手拧着轮子和螺母上紧,这样固定得就比较牢了。
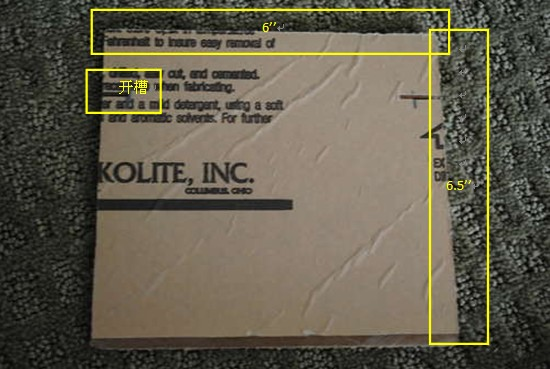
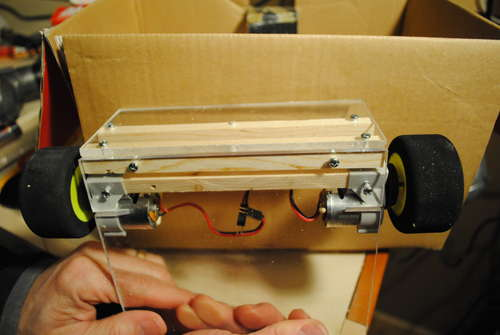
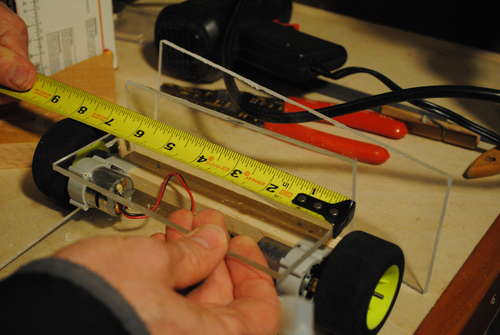
7 基座
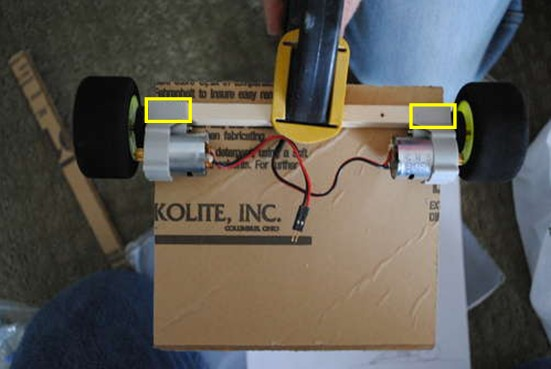
- 锯个6.5英寸x 6英寸见方的有机玻璃作为基座。
- 如最后一张图所示,在6.5英寸长度的两条边上都开一个0.5英寸的槽,槽距离6英寸的那条边1.5英寸,以便马达好固定。


- 切一条6.5英寸长,横截面是1cm x 1cm的木棒,这个是要插在固定马达用的那个捆绑接头的方孔中起到固定作用的。(@@晕了晕了,各位同学自己看图会意吧)。
- 保证所有的机械连接是牢固的。
- 把有机玻璃的防护贴纸去掉。
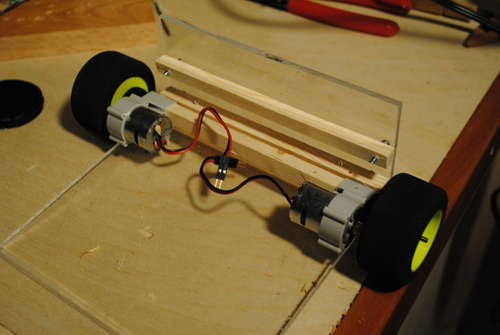
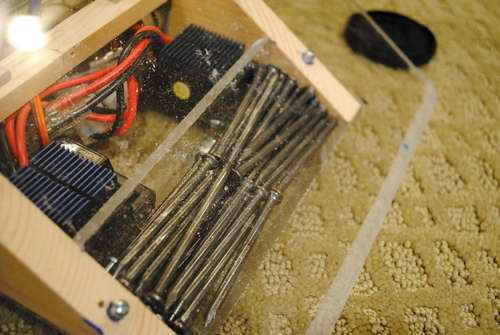
- 如第一张图所示,在框出来的两个位置打两个孔,要穿过变速箱的塑料壳和木棍还有有机玻璃。
- 在打的两个孔里面上螺丝以固定住这些部件。
8 装配

- 锯一块2.5英寸x 6英寸见方的有机玻璃作为背板。
- 用线锯在这块有机玻璃上开一个1英寸x 0.5英寸的槽,距离两端都是2.75英寸。
- 锯两块2英寸x 2英寸的方形有机玻璃。
- 锯两块木条(就是前面把马达连起来的那种6.5英寸的,用于将那两块方形的有机玻璃固定)。
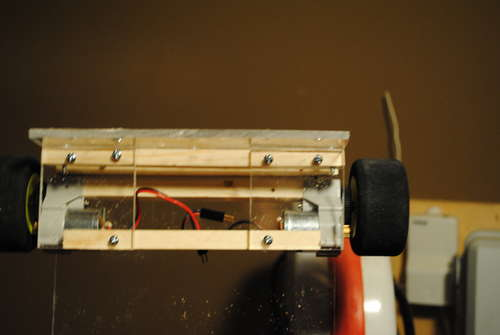
- 把一块木板放在基座上马达的后面,然后在在背板上面打两个孔(用来固定木板,所以孔要穿过背板打到木板里面去)。
- 用两个螺丝把背板和木板固定。
- 第二块木板放在距离有机玻璃底部1英寸处(就是两块木板之间的间距大概是5/8英寸)。
- 再打两个穿过木板到有机玻璃的孔。
- 把第二块木板拿开,把那两块方形的有机玻璃放上去。
- 把那两块2英寸见方的有机玻璃,分别对称的放在木板的两端。
- 有机玻璃和木板上面的螺丝孔应该能恰好对得上。


- 再在那两块有机玻璃上打两个孔(就是这两块小的方形有机玻璃总共需要打四个孔来固定)。

- 用螺丝将有机玻璃固定在木板上。
- 把已经固定上了方形有机玻璃的木板固定在背板上,方形有机玻璃朝上。
- 最后把已经装配好了的背板固定在基座上。
9 正面的斜坡
- 锯一块3.5英寸的木条。
- 用辅锯箱(辅锯箱的刀片角度为30°)锯出一个锐角为30°的直角三角形木块,30°正对的那条边为2英寸。
- 锯一块6.5英寸x 5英寸x 3/8英寸的木条。


- 把木条放在三角形木块的背面,三角形木块在木条的两端。打上两个孔,用螺丝将木条和木块固定,不是上面的图上这样的,看成品图可以看到,只用到了两个三角形木块的。
- 如果螺丝不够长,可以打一个外径比螺丝大的锥形孔,这样螺丝可以拧到木条里面去。


- 把已经连好的这个结构放到基座上,连接三角木块的木条放在那两块方形的有机玻璃的下面。
- 通过那两个方形的有机玻璃上打两个孔,把它们和木条用螺丝固定起来。

- 把基座翻转过来,如图位置,在基座上打四个孔,用螺丝把这两个三角形木块和基座固定在一起。
10 电子元件装配

- 把电子变速器用导线连起来。
- 用电工胶把导线露出的部分分别缠起来,用束线带把导线束在一起。
- 把马达导线和电子变速器的导线接在一起。
- 把电池的导线、电子变速器的开关、遥控器接线都通过基座上开的槽接出来。

- 如图所示,所有的线都可以藏在这里。
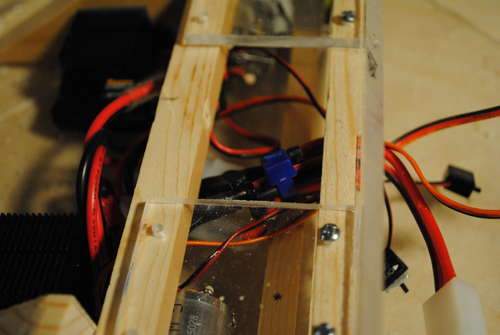


- 电子变速器背面是有双面胶的(没有的话可以自己用双面胶),把电子变速器固定在图示位置,变速器的边距离背板2.75英寸。
11 正面的楔形
- 锯一块6.375英寸x 11.5英寸的有机玻璃。
- 这块有机玻璃的11.5英寸那条边其中的一条,磨/切割出一个45°的斜面(就是贴近地面的那个面,这样铲起来就更方便了,和地面的接触就更好了)。
- 切一块5.25英寸x 1英寸的有机玻璃条,用来形成一个存放配重的空间。

- 把这块5.25英寸x 1英寸的有机玻璃条放在基座上,恰好就是在变速器的前面。
- 把基座的前面一部分都用配重物品填上(螺丝钉啊什么的,只要够重就行,这样相扑机器人的不会因为重心偏后跑着就仰倒了)。
- 把大的有机玻璃放在楔形木块上,打四个孔,用螺丝固定。

- 在斜坡和地面接触的那个面,尽量用砂纸打磨,使得其和地面是平行平面接触的,但是斜坡的表面是要光滑的。
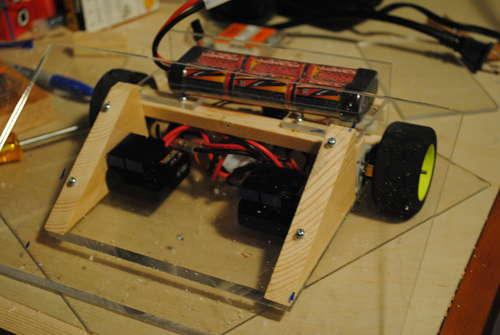
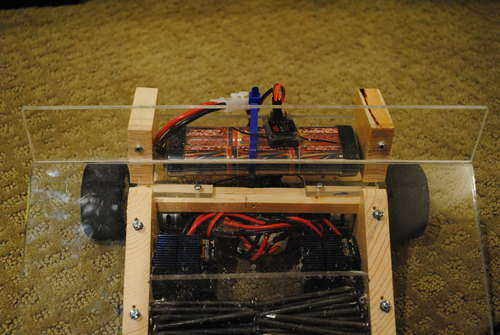
12 电池和斜坡的顶部
- 锯两块0.875英寸x 0.875英寸x 0.625英寸的木块。
- 锯一块1.5英寸x 11.5英寸的有机玻璃条。
- 把这两个木块放在有机玻璃块的外面。
- 通过背板到木块打两个孔,用螺丝把木块固定在背板上。
- 把有机玻璃条放在木块的背后,打孔,用螺丝固定住。
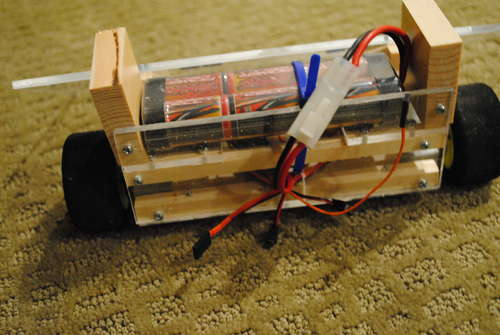
- 电池放在如图所示的槽中,用束线带固定住。
- 电子变速器的线和遥控接收器的线通过通道2和3接起来。
- 把接收器用双面胶粘在电池的顶部。
- 把开关粘在有机玻璃条的背面。
- 把各种导线固定好,保证电路没错,不会短路也不会断路。
13 遥控器



- 给遥控器上电池,给机器人的电池充电
- 控制器的换向应该设置为:
1-off (下) 2-off (下) 3-on (上) 4-off (下)
- 如果控制方向不对的话,可能是变速器的通道接错了。
- 因为AlphaFire同学用的是模型飞机的遥控器,这种遥控器是比较难操作,所以有操作困难的同学,可以像AlphaFire同学一样,用三根橡皮筋如图所示的绑在操纵杆上,这样操作就顺手多了。
14 DIYer签到处
| 编辑: | 灰色泰迪熊 |
|---|
果壳DIY站QQ群: 132647923 (加入时请报上你在果壳的个人主页地址,以防广告ID)
果壳DIY站微博: http://t.sina.com.cn/guokrdiy