

| DIYer: | UglyBuddha |
|---|---|
| 制作时间: | 一周 |
| 制作难度: | ★★★★☆ |
| GEEK指数: | ★★★★☆ |
这个有点像对眼儿版马力是基于ROS实际应用的一个简易机器人,虽然造价低廉,卖起萌来可毫不手软。 ROS 即Robot Operating System,顾名思义,就是机器人操作系统,包括hardware abstraction, device drivers, libraries, visualizers, message-passing, package management等等。
虽然看起很简单,不过这个机器人也不是个即插即用型的,人家是基于Ubuntu(乌班图,一种Linux操作系统)系统的,所以如果在座各位有用Linux系统的会觉得比较顺手。
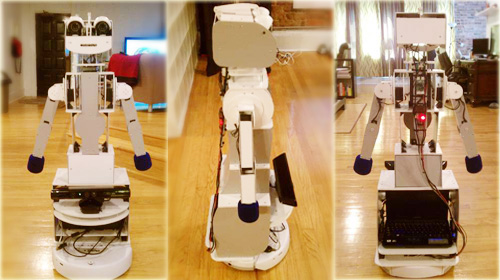
人家的大名叫做POLYRO,是oPen sOurce friendLY RObot的缩写,是基于ROS操作系统的 TurtleBot平台 的。是一位叫做 Willow Garage 的兄弟受到 Patrick Goebel 做的Pi机器人的启发做的。UglyBuddha哥在做这个机器人的时候也参考了维基百科有关 人机交互 的词条,有兴趣的同学可以前往。

好啦,前言就说这么多,ROS网站上有很多更新,等到肌肉男风行一时的时候说不定还可以做一个健美先生机器人。教程里面提到的很多材料工具什么的,如果大家找不到,请自行发挥吧。
无论做什么,还是安全第一啦!
1 工具和材料
2 准备工作
图纸1: 白色PVC 24" x 48" .240"厚的那块的
图纸2: 白色PVC 24" x 48" .120"厚的那块的
图纸3: 灰色PVC 24" x 48" .120"厚的那块的
以下是卖萌机器人操作平台的设计:
Polyro Platform Design .ai3 MB
3 切割PVC板

4 这么萌的眼睛怎么做





5 合体!PVC板们!

6 接线



8 最后说道点啥

9 DIYer签到处
| 编辑: | 小蜂 |
|---|
果壳DIY站QQ群: 132647923 (加入时请报上你在果壳的个人主页地址,以防广告ID)
果壳DIY站微博: http://t.sina.com.cn/guokrdiy