
AlphaGo与李世乭的交锋进行了两局,人工智能的两场胜利已经让社交网络“炸了锅”,无论接下来的战局如何,人们都已经深深体会到了人工智能的迅猛发展。
面对如此擅长计算,又不知疲倦日夜学习的人工神经网络,素来对自己大脑抱有自豪感的人类们不禁要感到失落了。那么,人脑的“天然神经网络”究竟还有什么值得自豪的能力?有什么领域还能为“天工智能”守住一点颜面呢?我认为是运动。
另一种智能:神经运动控制
大脑及神经系统对身体运动的控制能力,是人工智能绕不过的梦魇。几年前我在一次学术报告的开头讲到:“人类两岁就能快步行走,可机器人至今还步履维艰。”由此说明机器要想达到如人类一般精确而又迅速、灵巧而又协调的运动,需要另一种意义上的“人工智能”。这种智能要解决的不是认知和运算中的复杂性,而是如何驱动身体完成复杂的运动。
运动控制很难搞定吗?日常生活中的很多熟练动作人们几乎在无意识状态下就能完成,这使我们很少想起它实际的复杂性。哺乳动物的肌肉骨骼系统是个几百块散件拼起来的大拼图,要想同时驱动大拼图里面几十个关节、几百块肌肉协同运动,还真需要点“眼观六路、耳听八方”的聪明劲儿。更何况人类还进化出来一套奇葩的“直立行走”,这就好像把筷子立起来再戳上个苹果(工程学上叫“倒立摆”),那可是纯天然的不稳定:

人体协调的运动远不是简单的计算机模型能够模拟的,“QWOP”这个小游戏就能让人们直观地体会到这一点。这个游戏把运动员的腿部动作简化成大腿和小腿的开合,并把它对应四个按键交给玩家来控制。结果呢?这个游戏一下子就因为极其坑爹的难度火了起来,很多玩家用不了几秒时间就会让运动员摔得四仰八叉了。这还仅仅是二维平面上的简化版,如果再升级到真实版,也就是从平面拓展到三维再加上多块肌肉地面不平风吹草动……那只能说谁行谁上吧。
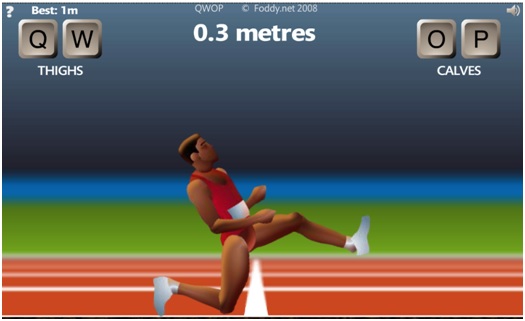 这个游戏告诉我们,控制运动可远没那么简单
这个游戏告诉我们,控制运动可远没那么简单
机器人越走越好,但比不过天然神经
运动控制并非易事,不过看看现在最先进的机器人,它们也已经不是昔日步履艰难的样子了。就在几天前,著名的美国波士顿动力公司(Boston Dynamics)发布了Atlas拟人双足机器人,它们陪人走路的姿势,禁踹不倒的下盘,还有“鲤鱼打挺”的起身,感觉实在销魂。
Atlas这台机器人最厉害的就是对多种路面条件的适应性,以及对于突发事件的抗干扰能力。从视频里看得出,这一系列的问题不但在控制策略上得到了解决,而且集成出来了一套人形大小的实际产品,着实令工程界佩服。
 Atlas机器人演示。
Atlas机器人演示。
不过,让人和机器人直接比拼运动,这对于人脑可是极不公平的。神经系统所应付的挑战比控制机械身体要困难得多。
人脑在控制人体运动的时候,面对的是一个极为头疼的“低端”身体。需控制的对象比机械结构要头疼的多,能够使用的生理元件也比电子元件要“低端”得多。
首先,肌肉是个非常怪的动力源,这东西只能拉不能推,干的是一半的活。而且肌肉拉起来有点像弹簧,你可以想象一下用两三个弹簧去拽稳一根棍子是什么感觉,而这种古怪的控制问题我们的大脑每时每刻都要对付。
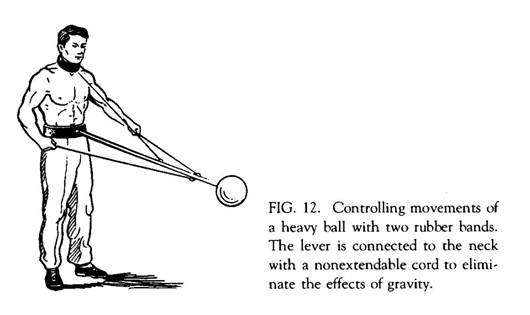 用好几根不同方位的弹簧拉拽“棍子”,这就是我们身体的运动方式。
用好几根不同方位的弹簧拉拽“棍子”,这就是我们身体的运动方式。
除了肌肉以外,人体神经系统还有两大运动控制的“猪队友”——噪声和延时。一个神经元典型的信号是下面这个样子,噪声很大,神经脉冲也不怎么精确。这种信号要是拿给电子工程师用,一定会被劈头盖脸丢回来重画电路。
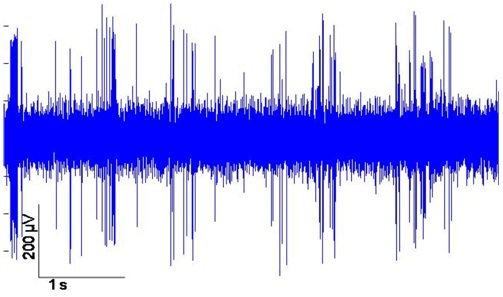 研究中记录下的不甚清晰的神经信号。图片来自:Nathan Jackson et al.
研究中记录下的不甚清晰的神经信号。图片来自:Nathan Jackson et al.
更逆天的是神经元传导电信号的速度非常慢,最快的神经纤维也就是每秒传递100多米。可是机器人呢?那可是以光速在传递信号。
所以说,“天工智能”和“人工智能” 在运动方面并不是同场竞技。如果把机器人的马达都换成弹簧,再丢进满是噪声的电磁环境,还要把信号通路故意延迟几百万倍……这样折腾下来,看看机器人即便做到“步履蹒跚”是不是也要热泪盈眶了?
像神经网络一样运动
这样的比较看起来似乎强词夺理:既然机器可以用简单的程序、“高端”的零件来运动,那有何必让它去走神经系统复杂的老路,这难道不是“自虐”吗?不过,这样“自虐”的研究思路确实也有它的价值。通过计算机解析和重建天然的运动控制系统,能帮助我们深入了解运动控制系统,帮助那些身患运动障碍的人们。现在,人工智能已经可以学习和“思考”很多,但只有当它们在运动控制方面也通过“图灵测试”时,那些科幻电影中看起来与人类并无二致的AI才能真正成为现实。
现在,科学家们已经在这条“自虐”的道路上进行了不少研究。一种相对简单方式是保留神经信号的承载形式,也就是利用脑机接口从大脑获取并“破译”信号,让机器按大脑的意图运动。在2016年的一项最新研究中,大脑植入芯片的猴子已经自己用“意念”开起了轮椅[1]。
 “意念开车”的猴子
“意念开车”的猴子
而另一种研究思路则更进一步,直接将控制大权交给了人工神经网络。研究者们既让人工神经网络保留了大脑脉冲信号的奇特性质,又拿它驱动类似人体的骨骼肌肉模型[2]。
 看起来不甚灵活,但这可是用人工神经网络控制人工肌肉的运动。来自:Dura-Bernal, Salvador, et al.
看起来不甚灵活,但这可是用人工神经网络控制人工肌肉的运动。来自:Dura-Bernal, Salvador, et al.
神经运动控制探索者们的终极考验,就是要把骨骼肌肉神经元这些难搞定的元件都保留下来,然后让人工的“智能”在这样严苛的条件下依然可以再造出与人脑匹敌的运动。身为神经运动控制探索者中的一员,我对于AlphaGo的成就甚感欣慰,但远未叹服。如果有一天,亚洲小李子对面能坐着一个化身人形的 AlphaGo,它能在对弈中举棋落子,得胜后握手言笑,那么人工智能又会进入新的纪元吧。(编辑:窗敲雨)
文章题图:shutterstock 友情提供
参考资料:
- Dura-Bernal, S., Zhou, X., Neymotin, S. A., Przekwas, A., Francis, J. T., and Lytton, W. (2015). Cortical spiking network interfaced with virtual musculoskeletal arm and robotic arm. Frontiers in Neurorobotics 9. doi:10.3389/fnbot.2015.00013.
- Dura-Bernal, Salvador, et al. "Cortical Spiking Network Interfaced with Virtual Musculoskeletal Arm and Robotic Arm." Frontiers in neurorobotics 9 (2015).