
|· 本文来自“我是科学家”·|
“墨甲”是全球首支中国风机器人乐队,旨在用现代科技传承和发展中国文化,塑造中国机器人原创IP。整个团队包括科学家、雕塑家、音乐家,作品融合了人工智能、机器人和中国雕塑造型艺术、民族音乐,是真正有文化内核的中国原创科技艺术作品,将为大众带来全新的感官体验和交互方式,探索智能社会下的人机共融新关系。清华大学机器人动力学与控制博士为我们带来《墨甲:做中国的机器人艺术IP》。
我是来自清华大学未来实验室的胡天健。
未来实验室是清华大学2017年年底,对标MIT的Media Lab(麻省理工学院媒体实验室)成立的一个面向未来、多学科交叉融合的一个实验室。我今天给大家介绍这个实验室做出来的一项成果——“墨甲乐队”。
墨,取自“墨子”——在中国的古老文化里,工匠精神源于墨子和公输班。甲,取自“木甲机关术”——是中国工匠文化的代名词。
中国的机器人艺术IP,其实要很多科学家和艺术家在一块儿才能做成。所以,我想先介绍一下我们的团队。
我们团队有雕塑家、音乐家、文化工作者,也有科学家、工程师。其中,核心的主创人员是六位老师和同学。

首先是米海鹏老师,他现在是清华大学未来实验室的副教授。他的本人经历就很有意思:清华大学物理系的本科(理学学士)、电子系的硕士(工学硕士)。在获得了日本东京大学的机器人博士学位后,他回到清华大学,在美术学院这样一个艺术学院当老师——只有这样的跨界经历,才能把这帮人攒到在一块儿,一起做这件事情。
我呢,本科就读于清华大学精密仪器系,博士研究的是机器人动力学与控制,所以一直是一个典型的理工男。我过去做了很多工业上的东西,从来没有想到有朝一日会跟科学家、工程师和艺术家组成的团队工作。
第三位是曾强博士。曾博士本科在哈尔滨工业大学,然后到新加坡国立大学读机器人博士,后来又去荷兰埃因霍温理工做访问学者。
第四位是张升化老师。张升化老师是清华大学雕塑系的本科、硕士和博士,他也是中国最早一批做动态雕塑的学者。他的作品,待会儿我也会介绍,在动态中反映中国之美。
第五位是胡骁阳老师,他本科和硕士都毕业于中国音乐学院,本科学的是器乐,硕士学的是音乐科技。我们机器人乐队的表演曲目都是胡老师创作的。
第六位是佳音同学。佳音同学她的经历也很有意思:她父母都是学艺术的,她自己本科和硕士学设计。
所以,我们是一个非常交叉融合的团队。把艺术家、科学家、工程师拧到一块儿,做了件很有意思的事情。
现在市面上有很多机器人,生产中、生活中,到处都是。我想先问大家一个问题:关于机器人的详细记载,最早是在什么时候?
1495年,达芬奇画了一幅机器人武士的手绘,这可能是图形化描述机器人最早的记载。右边这张照片,是后人根据他的设计图制造的机器人。
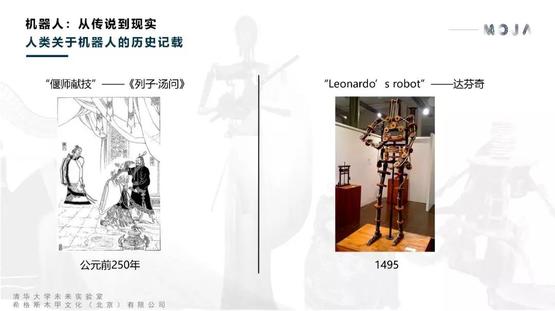
这其实不是关于机器人最早的记载和传说。《列子·汤问》里有一个故事,偃师献技:公元前一千年(大概是周朝,也就是三千多年前),一个叫偃师的技人为周王做了一个歌伶。这歌伶栩栩如生,可以像人一样唱出优美的歌。周王带着他的爱妃去看歌伶表演,饶有兴致;但是歌伶在演唱完以后,偷偷地瞟了一眼周王的爱妃。周王勃然大怒,当即就要把偃师给杀掉。偃师非常慌张,就跟周王说,这个真的是一个机器木偶,然后他就把机器木偶给拆开来给周王看。这就是世界上关于机器人最早的记载。
中国历史渊远流长,有非常深厚的底蕴。机器人在我们现在的生活、生产中,非常丰富,有非常多的应用场景和非常大的市场价值。很多应用场景大家可能会比较熟悉——

我们将来,一定会生活在一个到处都是机器人和智能机器的时代。

看看这些机器人:Boston Dynamics的Atlas和Hanson Robotics的Sophia,它们有非常鲜明的欧美风格;本田Honda的ASIMO和软银的Pepper,一看就有明显的日本风格,非常简约,线条干净柔美。右边是中国的机器人,在国内很有名:一个是优必选的机器人,一个是康力优蓝的机器人。
但是中国的机器人,该长什么样?会不会很大程度上受到欧美科技风的影响,长得没有中国的样子?
我觉得,这是中国学者面临的一个重大问题,也是我们最开始做这件事的源头。

我们的灵感来源于中国古典文化——中国的古典文化里,工匠精神以及机器人的文化是源远流长的。我刚刚已经跟大家介绍过公元前一千年的偃师献技的故事。除此之外,还有墨子和公输班(即鲁班)的故事:墨子擅长防守,公输班擅长进攻,两者造了很多木甲机关进行对垒,这也是木甲机关术的源头。后来,三国诸葛亮用木牛流马在北伐时运输粮草。这些都是中国很好的工匠文化和古老的故事,尽管很多可能难以考证,但至少能证明,早在三千年前,我们国家有自己的工匠文化。
其实,我们有扎实的基础(工匠文化和精神),但是很可惜的是,没有被后世继承,也没有从文化和精神积淀中长出我们自己的科技。所以我们现在的科技体系和工业体系,往往还是欧美的风格。
时间发展到今天,我想,我们这一代学者和科学家有自信和使命去做中国自己的机器人。
这件事情,其实也跟之前团队每个人的工作有关系。

米海鹏老师之前在日本东京大学读博士,跟着他的导师做世界第一支机器人乐队,Z-Machines。

大家可以看这张照片,演奏风格非常重金属和摇滚,机器人外形也是机械风格的。他做完之后,就一直在想:中国如果有自己的机器人乐队,应该长什么样?应该用怎样的演奏和艺术风格来表达中国文化?这就是十几年来,他执念于做这件事情的源头。
他回到国内后,在未来实验室参与了很多项目——其中就包括跟百度合作的小度。

雕塑家张升化老师,他是中国最早做动态雕塑的一批学者。他的作品都是在动态和机械结构的美中,传承一种文化精神。大家可以看下面一些照片——
这是一个人形机器人,ADAMS。
这是一头奔跑的鹿,就是把一些木质的构件搭建在一块,然后用一个电机,通过传动的方式让四条腿运动起来——仅仅是引用了一个动力源,就完成了多自由度的运动,而且还传递出了一种美感。然后我们就可以看到这样一个形象。


其他的,还有时间旅者、讲故事的精灵、栖梧等等,都是这些动态雕塑里面的东西。

我本人呢是一个纯正的清华理工男,所以我过去做的离艺术非常非常远。我过去做的主要工作是在工业领域,像汽车冲压生产线上高速的机械手(上图);还有医疗里面,脑神经外科的手术导航机器人(下图)。
我们想,西方人可以用机器人来编他们的科幻,中国人也能够用我们自己的文化讲机器人的传奇。于是我们就想做一个有中国文化特质的机器人,引领中国机器人风的IP的崛起。

我们团队第一步做的,就是“墨甲乐队”。乐队有3名乐手,分别来吹竹笛、弹箜篌、打排鼓。这三件其实都是中国非常传统的乐器,背后有非常多的故事。
像笛子,有几千年的历史,是中国民族音乐发展的一个非常重要的推动者。最早的时候,我们的祖先用兽的骨头做骨笛,后来有了玉笛、竹笛等等。
像箜篌,其实很特别。很多人看到会说,这是竖琴——其实竖琴是西方乐器。箜篌和竖琴同宗同源,几千年前都起源于波斯,然后向西传播,就变成了竖琴;向东传播,就成了箜篌。在隋唐时期,箜篌是一件非常兴盛的宫廷乐器,音色非常和美,经常在敦煌壁画中出现。但是很可惜的是,在明清的时候,箜篌这件乐器失传了,市面上再也看不到箜篌;直到上个世纪80年代,我们的音乐家根据敦煌壁画的形象复原了箜篌。今年的《国家宝藏》,好几期节目都讲到了敦煌壁画和敦煌文化,以及箜篌的故事。所以我们做的这件事情,对于中国的文化传承也具有非常重要的作用。
第三个就是鼓,这个叫五音排鼓,不是架子鼓。五音排鼓一共有五个鼓,每个鼓代表一个音高,都可以敲出音高来。鼓这件乐器,其实也是有几千年的历史,在中国最古老的文化里面,鼓是一种祭祀乐器。
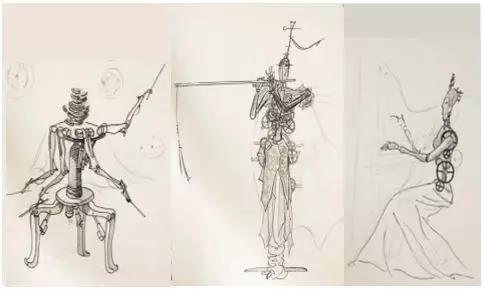
在去年的九月底、十月初的时候,我们的雕塑家用铅笔手绘了这样三张图——这就是设计机器人的第一步,有一张漂亮的、有文化理念的图。

然后我们花了大概七个月的时间,做出了机器人的实物,有丰富的动作形态以及乐器的表达和演奏。
这三个机器人的形象,其实也有自身的文化内涵和人设——
一谈到吹笛子,都是玉树临风的大侠,大家可能会想到东邪黄药师。那么吹笛子的机器人该是一个男性的形象,站在乐队C位。而且笛子的特点就是音色非常清亮,在乐队中它叫做线条乐器,起到主旋律的作用,是整个音乐的骨头。
弹箜篌的一定是一个美丽的东方仕女,是一种温婉尔雅的美丽的形象。箜篌在乐队里正好叫肢体乐器,起到血和肉的作用。
鼓,节奏非常热烈,非常活泼、非常阳光。所以它是一种打击乐器,同时也是一种节奏乐器。
所以整个编排也是有音乐考究的。

我们给这三个机器人取了非常有趣的名字,笛子机器人叫玉衡,箜篌机器人叫瑶光,排鼓机器人叫开阳。玉经常被用来制作笛子,玉衡也有玉树临风的感觉;瑶光是一个温暖、柔美的形象;开阳是一个热烈活泼的形象——跟乐器形象设计完全相符。并且三个名字都源自北斗七星的前三颗星,所以有很强的拓展性
我们结合了舞台的多媒体,做了一个非常漂亮的show。12月第一版做完了之后,我们在美术学院做了一个学院沙龙,进行了第一次亮相。后来我们在今年的4月27日、28日,完成了整个乐队的编排,并且跟舞台多媒体、演员在一块儿作了一个测试。

今年是清华大学108周年本命年,然后4月28日就有校庆。我们团队源自清华大学,所以在那一天做了一个首演。

演出反响不错,受到了很多媒体的关注——特别是来自海外朋友的喜爱。我们的首演在Facebook七天内达到12万+的阅读量,清华海外宣传片也有40万+的观看量。我们没有做任何工作,也没找水军,凭着质量上了百度和微博的热搜前十,峰值的人数到了500万人次。
下面给大家看一下我们机器人乐队当时的演出。
这里面所有的声音,都是乐器自己发出的,演出后面用音响加了一些电音——电吉他还有打碟的声音。演出的艺术设计,其实就是从一个怀旧的箜篌民乐,慢慢把笛子、排鼓引进来,变成了新民乐,之后再加电音,让中国古典乐器和西方现代乐器做一个混合,最后推向高潮。我们设计了一个十五分钟的剧,包括人跟机器人的调试互动,以及最后的一个演奏推向高潮,这里放五分钟。
咱们是科学家的论坛,所以也要讲点技术。其实机器人演奏,基本原理说起来蛮简单的。首先要有一个乐谱,或者声音、波形、信号等等,作为基本的输入。其次,要通过机器人理解乐谱,翻译成执行器的动作,然后控制执行器在合适的时间段完成相应的动作序列。最后,动作序列跟乐器发生关系,生成一个自然的振动波形,就成了音乐。大概过程就是这样的。
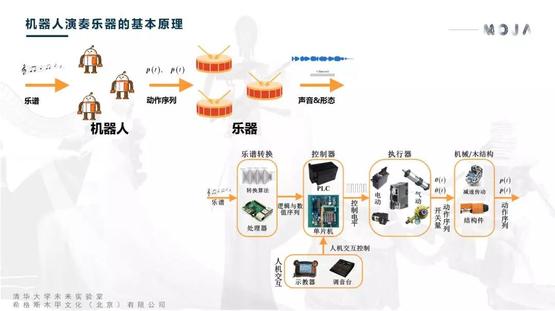
再往下走,就是一些具体的技术架构。乐谱过来,得有处理器——其实用一些简单的Adiuno 或者深度学习的东西也可以搞定。然后会有一个用户转换,来形成执行器的逻辑序列。接着,逻辑序列根据控制器来控制波形,一般包括开关量和一些PWM量,这是比较基本的。最后,再去驱动执行器构件。此外,还有一些人机交互的东西。
基本的技术架构原理很简单,但做起来其实比较难。整个过程,也得突破一些核心技术——
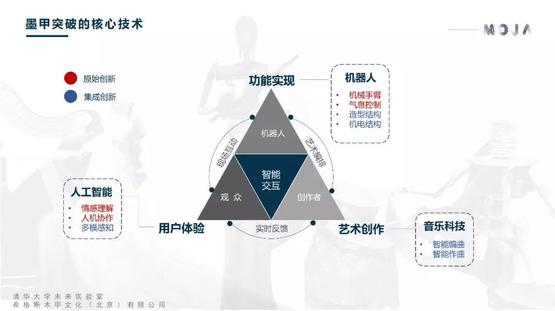
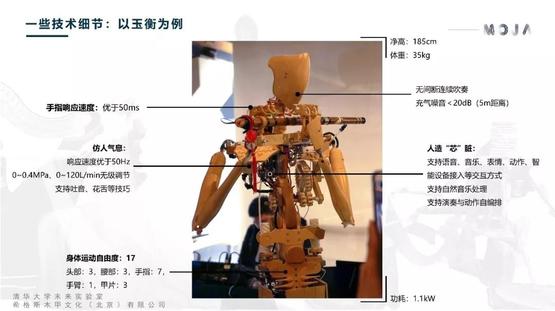
要实现机器人的功能,得做一个非常灵巧的手臂,还得具备对气息的控制——吹笛子就得模仿人的气息,像口风、单吐、多吐、花舌等等。此外,要达到期望的用户体验,得让机器人去传递情感,要配合人进行人机进行协作等等。每个目标都涉及一些关键技术,包含挺多技术细节。

我们整个乐队,现在的控制量大概能达到一百二十个——是什么概念呢?一般的工业机器人,控制量可能不到十个。所以,我们三台机器人的控制量,大概在十二台工业机器人的体量上。但总体核心还是围绕中国文化。
我下面就跟大家分享一下,怎么样去做一个机器人。其实作为一个工科生、理工男,我认为做机器人的过程很有趣——我们不光设计了这个机器人(编了它的控制序列和软件代码),还手把手地从一个个零件、一个个构型把它安装出来。
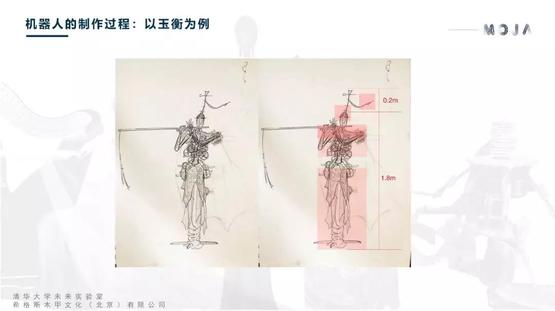
首先,我们要有一张艺术家的图,这张图支撑起造型和结构,也支撑起文化故事和机器人人设。
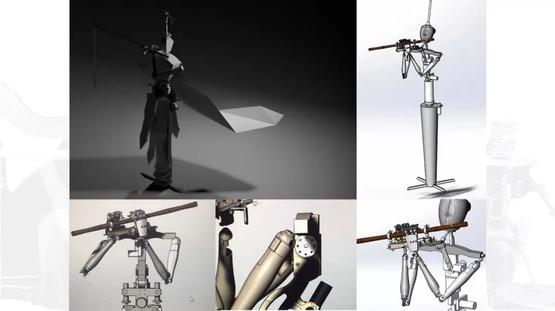
然后,我们去加工它的零件。首先要建模建机械模型,进行三维渲染,把模型迭代。

接下来,我们可能就可以拿零件进行组装了。如上图所示,首先做一个腿,然后把躯干装上去;接下来可以装手,同时把演奏的东西装上去;最后再搁个头上去——刚开始没有机器人的头,只好搁一个小朋友的头上去。

接下来比较难,要实现机器人的吹奏。吹,它涉及到一些流体上的控制,需要做很多的实验和尝试。就像人学习吹笛子那样,首先要会吹气。

先不加手指连着吹,控制口风。

再把手指装上去,按那些指孔。刚开始的时候,有时候有声音,有时候没声音——因为气量跟手指配合的不好。
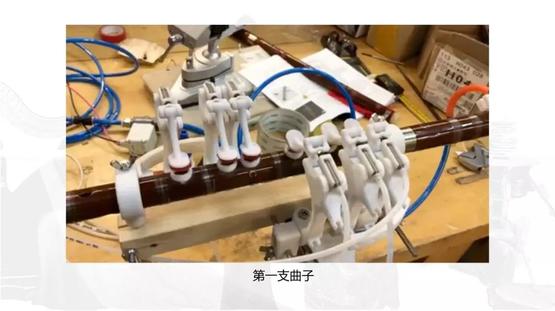
过了一段时间,终于可以吹出完整的曲子了——不过不太准。
这可能不光是中国风机器人第一次吹笛子,还是机器人第一次吹笛子。吹的第一首乐曲叫做《小星星》,后来也被我们用在箜篌的调试中。所以,笛子机器人和箜篌机器人用的第一首曲子都是《小星星》——Twinkle twinkle little star像是一个Hello world,是测试的第一句话。所以,我认为是一件很有趣也很有意义的事情。

第一首曲子,明显音不准,为了音准,我们又做了很多的工作。所以做这个机器人,我感觉像天天在动手术,这里插根管,那里再钳个东西走。
把所有的东西都调完,这个机器人就算做完了。
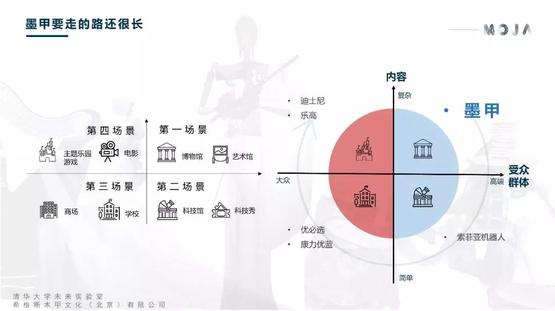
艺术跟人类的诞生,其实是同源。所以伴随着人类文明的艺术,也具有非常长的历史和强大的生命力。墨甲只是我们走出的第一步,是一个小小的开端。中国文化博大精深,以后还可以延伸非常多的场景,做很多的事情。
美国有了迪斯尼和漫威,丹麦有了乐高,那中国的IP在哪里?我们自己有没有一个可以用科技来承载文化的IP?我想经过很多的努力,最终我们能做一个中国风机器人的IP,它有很长的路可以走,有很多的应用场景。

为了这件事情,我们也做了很多线上和线下的工作。大家如果有兴趣,可以扫这个二维码,这是我们的公众号。定期和不定期的演出,还有一些活动,我们都会在线上做一个发布。至于线下,清华大学有一个社群,可能会慢慢辐射到五道口学生。
最后,做个结语吧。我们在排《墨甲幻音》这个舞台剧的时候,有个主人公叫小墨。他舞台剧结束的时候,有一句台词:我们为什么要做机器人?人和机器人到底什么关系?这些问题我也回答不了。只是有时候,我趴在工作台上睡着了,就会做一个梦。在梦里,我能看到一束光,好像在告诉我,再往前走走吧。再往前走走,你就明白了。所以只要那光还在,我就不会停下脚步,会一直一直走下去。这反映了我们主创团队的一个心声。
好,我的今天的分享就到这里,谢谢大家。
 演讲嘉宾胡天健《墨甲:做中国的机器人艺术IP》
演讲嘉宾胡天健《墨甲:做中国的机器人艺术IP》