

到目前为止,大多数机器人都可以分为以下几类:装有爪子、轮子的叫做Widgetophora,他们通常长的和普通机器不太一样(比如电影《星球大战》里的R2-D2)。此外就是类人型机器人(Anthropoidea),他们的外观设计努力向人类靠拢——有一张脸、能运动的手臂、脚和腿(比如电影《星球大战》里的C-3PO)。介于这两个极端之间还有一些动物机器人,他们叫做Zoomorpha,通常类似于我们的宠物(比如索尼的机器狗,阿宝)之上,当然,它们比玩具威武多了。

惊恐的C-3PO和R2-D2同学合影
科学家们天马行空的想象力给动物机器人带来了繁荣的发展。现在工程师们不仅复制狗,还有长了胡须的鼩、会游泳的鳗鱼、能抓东西的章鱼、能攀爬的蜥蜴和穴居蚌,甚至是呼扇呼扇翅膀就能起飞的小昆虫。于是,Widgetophora和Anthropoidea暂时被搁置下来,而将Zoomorpha这一类机器人的研发提上日程。
拥有柔软手臂的章鱼机器人
比萨圣安娜高级研究学院的Cecilia Laschi和和她的团队在就是这个潮流的代表,他们领导的国际财团正在研发一个机械章鱼。

蛋足畸胎的拥抱
他们从章鱼灵活柔软的触手开始,研发的人工头足类动物。脊椎动物通过肌肉产生移动,用骨骼提升重物。章鱼的触手没有骨头,所以它的肌肉必须同时完成移动和提升重物的功能,但除了抓东西,它还能挤到角落和缝隙里,这可是脊椎动物的手臂无法做到的。
在研究章鱼的触手如何工作的过程中,laschi博士和她的团队想出了一个有着类似功能的人工版本:外壳装有由硅和装有压力传感器,提供触觉,里面是缆和特殊弹性镍钛合金制成的弹簧,能将物体包裹住,这跟真正的章鱼得触手有着惊人的相似之处。
到目前为止,Laschi教授的机器人不止只是个蛋足畸胎的机械章鱼,她打算完善它并在未来两年内增加7只触手和一个控制系统使之能互协作,目的是创造出一个可以帮助人们完成困难的水下工作的机器人——例如关闭泄露的油阀。
鳗鱼机器人
在圣安娜,另一组由Paolo Dario带领的工程师也在研发一种水生生物:鳗鱼。
鳗鱼是简单的脊椎动物,像章鱼一样没有骨头(虽然他们有一个基本软骨骨骼),神经系统十分简单。在斯德哥尔摩的卡罗林斯卡研究所,Sten Grillner的团队为深入了解脊椎动物的神经系统,已经花费多年时间研究鳗鱼。
Sten Grillner研究鳗鱼的最后一步就是观察鳗鱼的机器人版本。,它是由仿照鳗的软骨椎骨的圆形段组成。每个部分有一个电磁铁连接,激活它们的电流,从头部传导到尾部,就像神经信号流在一个真正的动物体内传导一样,一段吸引另一端,再释放下一段以此产生一个波动,推动机器人前进。
鳗鱼的眼睛是微型摄像头,搜集周围的颜色和形状信号,以便使鳗鱼能绕过障碍物。该项目的主要目的,是解释脊椎动物如何通过使用它们的洞察力,引导他们的运动。
机器蚌
另一个用机器人去解读动物行为的动物学家,是美国苏黎世大学的Daniel Germann,他研究蚌,并正在创造一个模型,试图解答动物外壳的形状能怎样影响其生存机会。
许多蚌逃避掠食者的方式,是通过使用交替运动的外壳和柔软强健的脚内壳,挖掘海床并躲进去。这两部分轮流作为主要工具,从而使它们能向沉淀物中挖得更深。蚌还能通过收缩外壳,喷射高压的水和分泌物,驱动自己前进。这样,在受到威胁的时候,他们就可以在几秒钟内从敌人的视野中消失。
为了进一步了解事实真相,Germann先生设计了一个机器蚌。它有一个双壳类壳体,两部分移动阀相互驱使,以及一个能排出水的小泵(脚的最佳设计仍在寻找中)。一旦他证明,机械蚌能按照他设计的方式运行,他就会对外壳形状不同的蚌进行比较,以便找出效果更好的外壳的形状。一些形状的外壳属于新的物种,研究发明这些更现代是为了更有效的物种以便能击败原来的物种。
飞檐走壁的壁虎机器人
Grillner教授和Germann先生的学术项目属于有趣的类型,还有一些团体,比如Laschi教授,正在寻找更实际的应用。一个由斯坦福大学Mark Cutkosky的团队研发的机械壁虎StickyBotIII就是一个很好的例子。
壁虎飞檐走壁,穿越天花板的能力一直让人着迷,能做到这样的机器人,有很大的使用价值。壁虎飞檐走壁的秘诀,在于其脚趾都覆盖着树状的精细结构有点像脊的掌纹,它们之间有着很深的裂口,掌纹通过范德瓦耳斯力(分子间作用力)牢牢吸住所接触的物体表面,当然,能吸附在物体表面的动物(或者机器人)必须足够轻。
StickyBotIII像真正的壁虎一样有四条腿,脚趾也覆盖着一层脊。人工壁虎也可以做出跟真正的壁虎相同的动作,不仅能爬上垂直的墙面,还能将自己悬挂在上面。
有着敏感胡须的伊特鲁里亚鼩
仿生机器人还能模仿出人类所没有的感官能力。英国谢菲尔德大学的Tony Prescott团队,正在试图研发出有着敏感胡须的伊特鲁里亚鼩。这些鼩生活在地下,并依靠触须的感觉指引它们在洞穴中爬行。通过研究鼩的动作,Prescott教授和同事们发现,动物来回不断的扫动它们的胡须,这可能是一种第二类触觉。
利用这些信息,研究人员研发出了通过机器再现动物脑部的Shrewbot。它有18根长度不同,并由软件独立控制的晶须。到目前为止,Shrewbot已经能区分出平滑和起皱的物体了。Prescott教授还希望它能够识别一些基本形状,比如球、立方体和圆柱体等等,甚至将机器人用于人眼无法看到的地方,比如充满浓烟的建筑物。
长胡须的的小地鼠&盘旋的机械蜻蜓
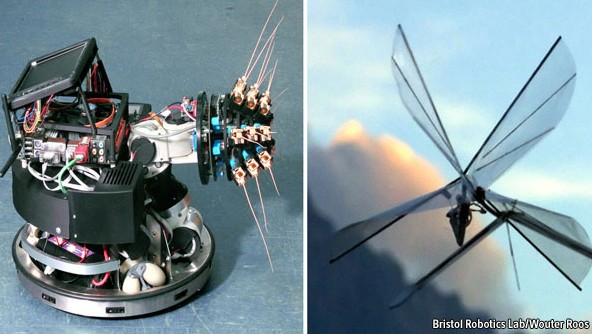
盘旋的机械蜻蜓
所有的这些发明都很有实用价值。工程师们设想了一种能扑翼飞行,并能盘旋的机器昆虫。这种配备了摄像头的微型飞行机器人,可以进入狭窄的危险区域,并报告里面发生的情况。
荷兰代尔夫特大学的研究人员Rick Ruijsink开发出了DelFly,一种机械蜻蜓。DelFly有两对由电动马达驱动的,能拍打的翅膀,这使得它既可以高速飞行,还可以进行悬停,这样就不会错过拍摄更多有趣的东西。首先被研发出的版本主要由远程控制,而不是真正的自主机器人。但是它能根据自身摄像头所拍到的信息,来调整自己的高度和方向,研究人员希望扩大这种能力,在未来,使机器人拥有真正的自主能力。
神似昆虫的飞行机器人
洛桑综合理工大学的Jean Cristophe Zufferey,用另一种思路研发出来了飞行机器人AirBurr。AirBurr虽然外观不像昆虫,但是行为非常相似,特别是它有昆虫一样,处理遇到障碍的能力。它能迅速地从地面恢复过来,并回到飞行的状态。AirBurr装有被碳板保护着的滴状的翅膀和小型螺旋桨,碳板柔软,能吸收冲击力。这样,即使是落在地上,它的螺旋桨也能总是保持准备再次腾飞的状态。就像真的虫子一样,总在你的房间里嗡嗡飞,却总也打不到。
新一代的动物机器人不需要真的看起来像的动物,重要的是具有与动物相同的能力。在未来,机器人最终可能会变成类似中世纪的怪物、鼩头、章鱼的触须或是鳗鱼。机器人也会拥有更多的功能,可能会是空中的机器人,给地面或水下的机器人提供情报,从而构成机器人系统。
信息来源: economist